Технические науки / 6.Электротехника и
радиоэлектроника.
В.А.
Медников, С.В. Перелыгин
Санкт-Петербургский
государственный институт кино и телевидения
О стабилизации скорости синхронного электродвигателя
Введение
Известно [1], что ротор синхронного двигателя,
вращаясь синхронно с полем статора, отстаёт от него по фазе на угол φ (внутренний угол синхронной машины).
В установившемся режиме, при постоянной номинальной нагрузке и строго
стабильной частоте питающего напряжения угол φ будет поддерживаться постоянным. Однако это не позволяет
устранить колебания мгновенной частоты вращения ротора из-за ряда возмущений,
которые могут быть вызваны трением в подшипниках качения, дисбалансом
вращающихся масс, изменением величины питающего напряжения. Такие колебания выражаются
отклонением угла φ относительно
его среднего значения и происходят на частоте, отличающейся на порядок в
меньшую сторону от частоты вращения самого ротора двигателя [2].
В устройствах кино- и видеоаппаратуры, где
предельно важна точность мгновенного углового положения ротора (лазерные
записывающие и сканирующие устройства), при высокой скорости вращения допустимое
отклонение угла φ от среднего
значения не должно превышать нескольких угловых минут [2, 3]. Для хорошо
отбалансированного электродвигателя без системы стабилизации амплитуда качаний
ротора составила по эксперименту ![]() при собственной
частоте качаний fк = 2,3 Гц
и коэффициенте демпфирования
при собственной
частоте качаний fк = 2,3 Гц
и коэффициенте демпфирования
ξ0 = 0,05 <<1
[3].
Расчетные
соотношения
Характер качаний определим из следующих
соображений. Известно, что динамические свойства синхронного двигателя с
достаточной точностью характеризуются передаточной функцией колебательного
звена второго порядка [2-4]:
 (1)
(1)
где ![]() – изображение по Лапласу
колебания фазы,
– изображение по Лапласу
колебания фазы,
![]() – изображение кратковременного
импульса момента сопротивления,
– изображение кратковременного
импульса момента сопротивления,
Т0 – электромеханическая постоянная времени двигателя,
ξ0 – относительный коэффициент демпфирования,
р – оператор Лапласа,
k –
коэффициент передачи по возмущению.
При подстановке в выражение (1) ![]() и последующем взятии от него модуля можно
получить амплитудно-частотную характеристику (АЧХ) двигателя. Остановимся на
ней подробнее. На рис. 1 представлена нормированная относительно своего
значения на низких частотах АЧХ электродвигателя без использования системы
стабилизации при экспериментальных значениях Т0 и ξ0.
и последующем взятии от него модуля можно
получить амплитудно-частотную характеристику (АЧХ) двигателя. Остановимся на
ней подробнее. На рис. 1 представлена нормированная относительно своего
значения на низких частотах АЧХ электродвигателя без использования системы
стабилизации при экспериментальных значениях Т0 и ξ0.
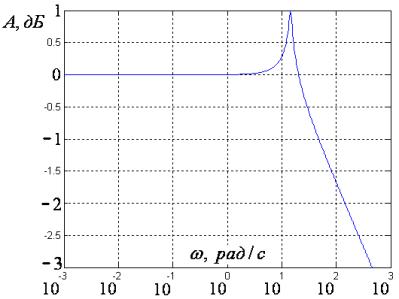
Рис. 1 Исходная
АЧХ электродвигателя без использования системы стабилизации.
Для получения малых качаний фазы необходимо
стремиться к тому, чтобы АЧХ имела по возможности малые значения и чтобы
максимум, соответствующий резонансной частоте, был сдвинут в область низких
частот. Для более ясного представления о качаниях фазы ротора двигателя следует
перейти во временную область. Для этого решаем дифференциальное уравнение
второго порядка и получаем аналитическое выражение изменения фазы во времени ![]() [3, 5]:
[3, 5]:
 (2)
(2)
Как следует из (2), параметры
колебательного звена влияют на амплитуду качания, его частоту и скорость
затухания.
Способ уменьшения качаний фазы ротора до
допустимого значения состоит в применении системы автоматической стабилизации
частоты вращения ротора двигателя. Данная система сравнивает фазы ротора и
статора с учётом угла φ,
формирует сигнал ошибки, а также находит его первую и вторую производную и производит
суммирование полученных сигналов для последующего воздействия на фазу питающего
напряжения. Такой подход учитывает инерционность вращающегося механизма и направлен
на то, чтобы скомпенсировать результат влияния возмущающего импульса. Иначе
говоря, взятие производных от сигнала ошибки позволяет системе стабилизации не
только получить сведения о мгновенном рассогласовании фаз ротора и статора, но
и о его дальнейшем изменении, которое требуется предотвратить.
При введении в систему стабилизации
пропорционально усиленного сигнала ошибки, а также его первой и второй
производных передаточная функция примет вид [4-5]:
 (3)
(3)
где ![]() ,
, ![]() ,
, ![]() – коэффициенты
передачи сигнала ошибки, его первой и второй производной, соответственно.
– коэффициенты
передачи сигнала ошибки, его первой и второй производной, соответственно.
Приводя выражение (3) к стандартной форме
записи передаточной функции колебательного звена второго порядка, имеем:
 (4)
(4)
Итак, изменение структуры системы
регулирования привело к изменению параметров колебательного звена:
- новая электромеханическая постоянная
времени
 (5)
(5)
- новый коэффициент демпфирования
 (6)
(6)
Решая дифференциальное уравнение
второго порядка, получаем аналитическое выражение изменения фазы во времени для
случая использования системы регулирования [3, 5]:
 ,
,
где новые параметры колебательного звена ![]() и
и ![]() рассчитываются по (5)
и (6).
рассчитываются по (5)
и (6).
Таким образом, введение коэффициентов
передачи сигнала ошибки позволяет изменить частоту и амплитуду качаний фазы
ротора и скорость их затухания.
Рассмотрим подробно влияние коэффициентов
передачи сигнала ошибки на семейство АЧХ двигателя, построенных в среде Matlab
при экспериментальных значениях Т0 и ξ0. На рис. 2 приведены
АЧХ двигателя для значений kd1 = 0; 0,01;
0,05; 0,1; 0,2.
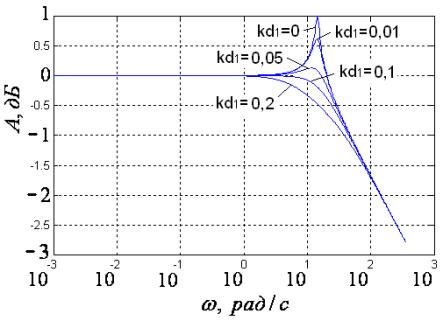
Рис. 2 Семейство
АЧХ электродвигателя для разных значений ![]() .
.
На графиках хорошо заметно уменьшение
выброса и его сдвиг влево с ростом коэффициента передачи первой производной
сигнала ошибки. Последнее (наибольшее) значение ![]() соответствует случаю
апериодического процесса, когда полностью сглаживается максимум АЧХ.
соответствует случаю
апериодического процесса, когда полностью сглаживается максимум АЧХ.
На рис. 3 приведены АЧХ двигателя для
значений k0 = 0; 1; 5;
10; 50 при фиксированном kd1 = 0,1.
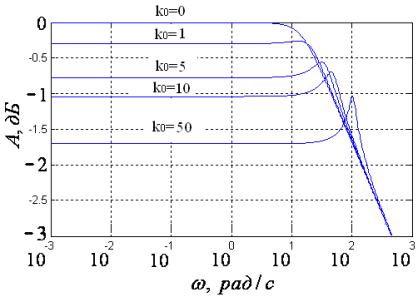
Рис. 3
Семейство АЧХ электродвигателя для разных значений ![]() .
.
Из рисунка следует, что с ростом k0
наряду с уменьшением площади АЧХ появляется заметный максимум, который
смещается в область высоких частот. Тем не менее, при обеспечении требуемого
коэффициента уменьшения амплитуды (примерно 40 раз) повышение частоты резонанса
не представляется опасным [3].
Для
обеспечения более устойчивой стабильности частоты вращения ротора двигателя в
систему стабилизации введена вторая производная сигнала ошибки kd2. На
рис. 4 приведены АЧХ двигателя для значений
kd2 = 0; 0,1;
0,5; 1; 2 при фиксированных kd1 = 0,1 и k0 = 50.
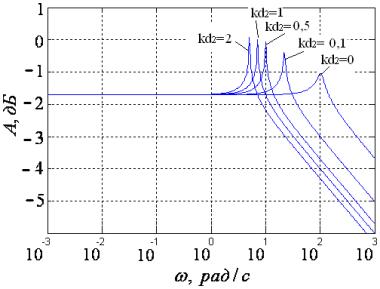
Рис. 4
Семейство АЧХ электродвигателя для разных значений ![]() .
.
Из графиков следует, что с ростом ![]() максимум
АЧХ смещается в область низких частот, при этом увеличивая своё значение.
максимум
АЧХ смещается в область низких частот, при этом увеличивая своё значение.
Зависимость параметров колебательного
звена от коэффициентов передачи сигнала ошибки дает возможность влиять на
величину качаний ротора электродвигателя. Задавшись тремя параметрами – во
сколько раз требуется уменьшить амплитуду качаний по сравнению с исходной, какими
нужно получить частоту качаний и скорость их затухания, – можно найти оптимальное
соотношение между коэффициентами передачи сигнала ошибки и его двух
производных. При этом соотношении качания ротора электродвигателя теоретически
не превысят допустимых значений.
Заключение
Для стабилизации углового положения ротора
электродвигателя необходимо использовать систему фазового регулирования. Введение
в систему регулирования сигнала ошибки и его производных (первой и второй)
позволяет не только ослабить амплитуду качаний фазы ротора, но и также
уменьшить частоту качаний. Введение второй производной в закон регулирования описано
впервые. В последующих публикациях планируется рассмотреть вопрос разработки и
установления оптимальных параметров корректирующего четырехполюсника,
выполняющего обработку сигнала ошибки, в том числе, взятие от него двух
производных.
Литература
1. Брускин А.Э., Зорохович А.Е., Хвостов В.С.
Электрические машины и микромашины. – М.: Высшая школа, 1990. – 432 с.
2. Дроханов А.Н., Иосифов В.Е., Смусь В.С.
Стабилизация оптико-механической строчной развёртки с зеркальным барабаном. –
Техника кино и телевидения. – 1975. – №6. – С. 41-46.
3. Медников В.А. Система стабилизации
строчной развертки для лазерного записывающего устройства. // Тенденции
развития отечественной кинотехники: сборник научных трудов. – Л.: ЛИКИ, 1985. –
С. 48-56.
4. Танский Е.А. Прецизионные системы
стабилизации скорости двигателей. – Л.: Энергия, 1975. – 88 с.
5. Бессекерский В.А., Попов Е.П. Теория
систем автоматического регулирования. – М.: Наука, 1975. – 768 с.