Аспирант Савицкая Я.А., д.т.н., проф. Ларин В.Ю,
Донецкий национальный технический университет, Украина
Киевский национальный авиационный университет, Украина
Определение оптимального или
субоптимального решения задачи равномерного продвигания линии забоя
Организация
научных и практических работ очистного забоя, подчиненная мультиагентной
технологии, рассматривает каждую подсистему управления угледобывающим комплексом
как гибридный альтруистичный агент, взаимодействующий
с другими агентами для достижения общей цели и работающего в динамической
нечеткой среде.
Существующие
подсистемы управления обеспечивают:
- все виды стандартных защит;
- автоматизацию процесса передвижения секций крепи в разных вариантах в
зависимости от горно-геологических условий добычного участка. При этом контроль
положения каждой секции выполняется гидроприводом с дискретным датчиком.
Отсутствие
аналогового сигнала не дает полных сведений об уровне недодвижки секции крепи к
груди забоя;
- контроль местоположения комбайна относительно секций крепи. При этом
точностная погрешность контроля, выраженная в линейных размерах, составляет 2,5
м за счет провисания цепи, с помощью которой лебедка со штрека передвигает
комбайн, а герконовый датчик положения, расположенный на комбайне, функционально
связан с лебедкой.
Таким образом,
диспетчер в какой-то степени обладает одним из главных показателей работы
участка;
- контроль распора секций крепи. Выполняется гидроприводом до упора в
кровлю, а величина распора не контролируется;
- контроль содержания метана обеспечивается переносным или установленным
на исходящей из лавы струе воздуха датчиком метана с инерционностью 30 минут. Потенциальная
энергии забоя распределена неравномерно, из-за концентрации метана в угольном
массиве и действует на режущий орган комбайна с силой, пропорциональной указанной
потенциальной энергии, которая не контролируется.
Таким
образом, Гроз не защищены от последствий внезапных выбросов угля и газа в
рабочее пространство;
- косвенный контроль потенциальной энергии на шахтах повышенной категорийности
предусмотрен только технологически путем нагнетания воды в пробуренные шпуры с
последующим «фактором времени», то есть ожиданием в течение 2-х часов пока
забой «вспотеет», при этом потенциальная энергия уходит вглубь массива.
Цель разработки мультиагентной системы –
удовлетворение требованиям системы управления качеством процесса угледобычи,
обеспечивающим достижение оптимального уровня производительности за счет
минимизации простоев по причине неустойчивости и конвергенции вмещающих пород.
Рассмотрим
способ оптимизации одной из указанных подсистем управления, а именно, процессом
недодвижки секций крепи к груди забоя. В процессе ведения горных работ
необходимо обеспечивать равномерное продвижение линии забоя по факторам времени
и жесткой посадки секций крепи.
Если
недодвижка перекрытия секции крепи значительна и распространена на значительное
расстояние вдоль забоя, то могут возникнуть вертикальные трещины в породах над
секцией, что приведет к превышению нагрузок на секции выше допустимых.
Поэтому
одному из агентов (подсистем) ставится задача ведения постоянного контроля
уровня недодвижки секций с начала работы комплекса, фиксации и отображения положения
перекрытия с точностью не хуже 3 см.
Используя
новые информационные технологии, рассмотрим подсистему контроля неравномерности
продвижения линии забоя, реализованную в среде инженерного
научно-исследовательского комплекса LabVIEW 9.
Представленная виртуальная модель является упрощенной. Комбайн
не входит в ее состав, а крепи перемещаются последовательно друг за другом. Технологически,
перекрытия крепи должны обеспечивать крепление не меньше, чем за 3 см от груди
забоя.
В данной работе диапазон возможного уровня недодвижки
составляет 3…15 см. Данные о расстоянии до породы автоматически записываются в
файл “Расстояния для остановки.xls”
после каждого закрытия этого файла.
Виртуальная модель работы подсистемы отображена на рис. 1 при открытии
файла.
Пример недодвижки перекрытия секций крепи к груди забоя
приведен на рис. 2.
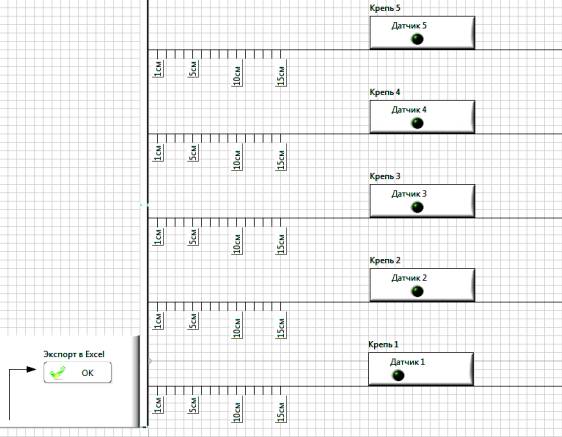
Рис. 1. Отображение работы подсистемы в исходном
состоянии
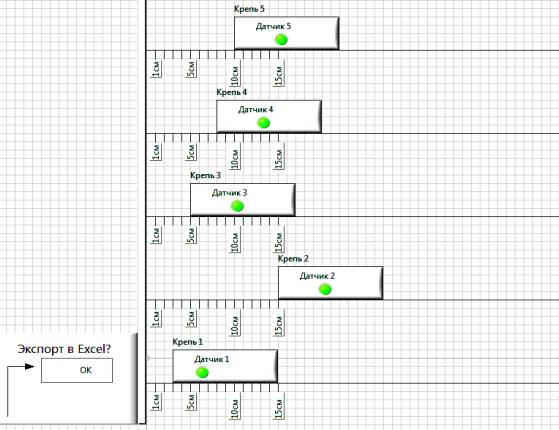
Рис. 2. Отображение работы
подсистемы в режиме недодвижки
перекрытия к груди забоя
Расстояния для остановки секции указаны в табл. 1:
Таблица 1
Возможные величины
недодвижки секций крепи к груди забоя

Рис. 3. Расстояния до груди
забоя от остановки секции
Если эти данные необходимо экспортировать в Excel,
то нужно перед запуском программы нажать на кнопку «экспорт в Excel».
На втором этапе информация запоминается и
хранится (рис. 4).


Рис.
4. Недодвижка перекрытия к
груди забоя
Для наглядности отображается характер недодвижки
секций к груди забоя. Информация суммируется при каждом цикле (рис. 5).
Рис. 5. Отображение характера
недодвижки
перекрытия к груди забоя
В результате можно сделать следующие выводы:
1. Выполнен анализ существующих систем
управления. Определены первоочередные задачи агентов (подсистем).
2. Разработан способ оптимизации подсистемы управления процессом недодвижки секций
крепи к груди забоя. При обратном ходе комбайна в режиме «зачистка» выдается
фрагмент функциональной модели процесса управления додвижкой секций крепи.
3. Определена необходимая точность контроля
уровня недодвижки перекрытия секций крепи, выраженная в цифровых единицах. При
этом должна обеспечиваться точность приближения к забою не хуже 3 см (условное
исходное положение); недодвижка в пределах от (1 до 5) см соответствует логической
единице «1», от (5 до 10) см - «2», от (10 до 15) см - «3».
4. Поставлены требования к дискретизации
характеристики преобразования датчика в соответствии с п. 3.
5. Разработана виртуальная модель для
хранения, анализа и когнитивной визуализации информации.
Литература:
1. Зборщик М.П., Чичикало Н.И.
Основы теории определения состояния добычных объектов в процессе их
функционирования / М.П. Зборщик, Н.И. Чичикало, – Донецк: РИА ДонГТУ, 1998. – 117с.
2. Ларин В.Ю. Основы
построения приборов и систем с ферри- и ферромагнитными преобразователями.
[Текст] / В.Ю. Ларин. – Донецк: ВБР, 2007. – 367 с.
3. Ларин В.Ю. Новые
методики исследований и разработки приборов и систем. [Текст] / В.Ю. Ларин. –
Донецк: ВБР, 2009.– 316 с.
4. Ямалов И.У.
Моделирование процессов управления и принятия решений в условиях чрезвычайных
ситуаций / И.У. Ямалов. –М.: Лаборатория базовых знаний, 2007. –288с.
5. Wooldridge, Michael J., An introduction to multiagent systems / Michael
Wooldridge, John Willey & sons, 1966.
6. Kosko B. Fuzzy Engineering,
Prentice-Hall, New-Jersey, 1997.
7. Hagiwara M. Extended fuzzy cognitive maps, Proc. Of the IEEE Intern.
Conference on fuzzy systems, March 8-12, 1992, San-Diego. – P. 795–801.