Економічні науки / Економіка підприємства
УДК
681.513.54
Fadyeyeva
I.G.
Ivano-Frankivsk national technical university of oil and gaz
ON
BICRITERIAL OPTIMIZATION OF WELL-DRILLING
SELF-COST
It is known [1,2], that one of the most
general and universal criterion of well-drilling process optimization is the
minimum of cost-price of 1m of drilling. Statistics [2] testifies, that now for
the drilling of one deep borehole (over 4000m) the
The
analysis of results of well-drilling in
Formulation of the problem. Drilling of a borehole includes the choice
of equipment, drilling method, geometrical size of the well, type of chisel,
quality and quantity of the washing liquid and technological parameters, such
as axel loading on chisel and its rotation speed. There is also a demand for
organization of drop-and-lifting operations forecasting of emergency and
completition of the well.
Problems
of well-drilling optimal control could be devided into problems which are to be
solved at the optimal project planning stage and those ones to be solved during the well-drilling process.
The second group of problems is most
difficult and important, since the efficiency of drilling enterprise’s activity
much depends on them. As numerous investigations show, succesful handling of
these problems make it possible to decrease well-drilling costs by 25-30%. At
the same time the development of the new drilling technique does not
significantly influence the decreasing of costs.
Adaptation
of technological parameters, quality and quantity of the washing liquid and
chisel’s type can be performed in accordance with fhe chosen optimality
criterion. In general case these criteria are devided into economical,
technical and technological, and informational ones. The economical criteria are the more preferable for deep oil and gas
well-drilling, because the costs-prise is one of the deciding indicators of
this process.
The most important economical criterion is the well-drilling cost-prise Bc. It includes material
expences, expences for chisels, pipes, usage of equipment and organizational
and technological elements, as well [2].
Cost-price Bc
![]() ,
(1)
,
(1)
where x=(T, H) and S is the feasible region (H
may be divided into N stages).
The
most important technological
criterion is the drilling time T
leading to the following task
![]() ,
(2)
,
(2)
with x and S as above.
From a technological point of view T can be divided into three components
at i-th drilling stage, namely
drilling time tδi,
drop-and-lifting operations time tcni
and auxiliary operations time tbi
(including replacement of chisel, waching of the borehole, and other control
and supporting activies). Hence, we get
![]() . (3)
. (3)
The drop-and-lifting time tcni is defined as
 ,
(4)
,
(4)
where Hi
is the depth of the borehole at the end of ith
stage; vi is the average
speed of drop-and-lifting.
Because  , where hk
is the width of stage and then we get from (4)
, where hk
is the width of stage and then we get from (4)
 .
(5)
.
(5)
Up to
now, the well-drilling process is optimized by choosing costs or time as objective function imposing
restrictions or the other indicator. Often, the cost-price Bc is preferred, because it takes into account not only
technical indices, but economical ones, as well. However, the “one-criterial”
approach is not always most suited, because it may lead to loss of information
or it even may hide desirable compromiss solutions. Thus, we are led to
multicriterial optimization tasks. This also illustrated by Fig.1 where for
sake of completeness the whole algorithm of well-drilling optimization is
given.
As one can see, there are three control levels in the drilling process (indicated by roman numerals). Problems of well-drilling control at technological level I (chisel’s trip) is solved as bicriterial crisp optimization with objective functions Bc (min) and speed of chisel’s trip Vp (max). At stage III we are faced with the performance criteria profit PR (max), costs of well-drilling Bcb (min) and well-drilling time Tpr (min). The problem under consideration is settled at stage II, namely drilling of the borehole till projected depth.
As already mentioned we are faced with the following bicriterial
optimization task
![]() . (6)
. (6)
The
feasible region S is given by
 (7)
(7)
In
Section III we discuss some details concerning this kind of optimization. For basic notions, theorems and
methods we refer to [5].
Fig.1 Algorithm of well-drilling multicriterial
optimization
Results. We
tooke for investigation 3 models: retrospective model, crisp operative model
and fuzzy operative model.
Retrospective model. The criteria
are based on retrospective analysis of
experimental data gathered from borehole SPAS-101 located in the Carpathians in
the
![]() ,
(8)
,
(8)
with Ti
= tδi + tcni + tbi in accordance with (3). Here, we have N=45. Drilling time tδi is given by such meaning:
 . (9)
. (9)
The auxiliary operations time is
constant: tbi = 1 hour.
The other quantities in (9) are as following (i = 1,…,45): relative wearout
of the chisel ![]() =0,02+(i-1)·0,022 [1/h]; initial drilling speed
=0,02+(i-1)·0,022 [1/h]; initial drilling speed ![]() [m/h] (see
Table 1): drop-and-lifting speed vi=250 [m/h].
[m/h] (see
Table 1): drop-and-lifting speed vi=250 [m/h].
Table 1.
i
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
0.75 |
1.154 |
1.333 |
1.714 |
1.2 |
1.074 |
1.5 |
0.923 |
1.333 |
2 |
1.714 |
2.4 |
|
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
|
4.285 |
4 |
1.5 |
1.09 |
1.2 |
1.714 |
1.2 |
1.714 |
1.764 |
2.22 |
2 |
2.5 |
1.714 |
1.25 |
|
27 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
40 |
|
2 |
1.333 |
2.4 |
2 |
1.875 |
1.333 |
2 |
1.714 |
1.333 |
1.5 |
1.333 |
0.857 |
1.5 |
2 |
|
41 |
42 |
43 |
44 |
45 |
|
1.741 |
1.2 |
2.4 |
1.714 |
1.578 |
 (10)
(10)
with the next meaning i Bci![]()
 (11)
(11)
with Ti
as in (8).
Here, we have :
specific
cost of drilling unit work Bo=82 [1/h];
cost of the
chisel Bg=6425.4 [units].
(During the optimization we omitted the constant
factor ![]() ).
).
Crisp operative model. In
opposite to the above model we now consider models permitting operative
control. This means that
we are able to control the process by the axial loading on the chisel Pi and rotation speed ni in each segmentation i. It turns out that the above
introduced values hi, T and Bc depend on these technological parameters. Here, N=15 proved to be sufficient for
modelling the process.
Again, (8)–(9) is valid with
 . (12)
. (12)
The overall costs are given by
![]() ,
(13)
,
(13)
where the costs of segment i reads as
![]() (14)
(14)
with
 . (15)
. (15)
Here [3],
![]() . (16)
. (16)
Coefficients k, kj , α, αj ,β, βj (j=1,2) depend on the geological properties and are a result from regression analysis. Their numerical values are listed up in Table 2.
Table 2.
|
k |
k1 |
k2 |
α |
α 1 |
α 2 |
β |
β1 |
β 2 |
|
0.006 |
25 |
1 |
0.4 |
0.05 |
0.15 |
0.25 |
0.1 |
0.15 |
The ![]() are the same as in Table 1, but only every third value is
accounted. The feasible set S now
reads as
are the same as in Table 1, but only every third value is
accounted. The feasible set S now
reads as
 . (17)
. (17)
Fuzzy operative model. In reality, however, drilling conditions (physical and mechanical properties of rocks and chisel, washing liquid and drilling column properties) may change, thus leading to parameter uncertainties. The latter may have dynamic, stochastic and/or nonstochastic character [3]. To estimate the latter, often experts statements are available. Here, we are faced with the typical situation that the specific costs Bci for ith segment are given as a rule-based system with nonstochastic uncertainties, namely
if Ti
is ![]() and hpi is
and hpi is ![]() then Bci is
then Bci is ![]() ; j = 1,…, M. (18)
; j = 1,…, M. (18)
Here, ![]() (k = 1,2,3) is a linguistic expression like “small”, “medium”,
“big”, etc., whereas M means the
number of rules. The complete rule base is given in the following matrix (where
indeces “i” are omitted for
simplicity).
(k = 1,2,3) is a linguistic expression like “small”, “medium”,
“big”, etc., whereas M means the
number of rules. The complete rule base is given in the following matrix (where
indeces “i” are omitted for
simplicity).
|
hp T |
VS |
S |
M |
B |
VB |
|
VS |
VB |
B |
VS |
VS |
VS |
|
S |
VB |
B |
S |
S |
VS |
|
M |
VB |
B |
M |
S |
VS |
|
B |
VB |
B |
B |
S |
S |
|
VB |
VB |
VB |
B |
B |
B |
VS – “very small”, S – “small”, M – “medium”, B – “big”, VB – “ very big ”.
Since fuzzy sets theory has proved to be a powerful
tool for modeling such kind of uncertainties and statements, we decided to
model the linguistic expressions by fuzzy sets. The rule base is tackeled as Takagi-Sugeno system.
Though the current inputs are crisp (real numbers) the result will be fuzzy due
to the fuzziness of the outputs. Hence, we applied a defuzzification
procedure to get numerical outputs [3].
Denoting the fuzzy sets (and somehow loosely speaking their membership functions, as well) in the jth rule by ![]() and
and ![]() we obtain for current
crisp inputs
we obtain for current
crisp inputs ![]() the corresponding
input evaluation as
the corresponding
input evaluation as
![]() , (19)
, (19)
where t
means a suited triangular norm (we took the product).
The current output ![]() will be obtained
(applying fuzzy arithmetic) as weighted mean over all rule output, i.e.
will be obtained
(applying fuzzy arithmetic) as weighted mean over all rule output, i.e.
![]()
 , (20)
, (20)
where the denominator is assumed to be positive.
It is well-known that ![]() is a fuzzy number as
well. For optimization we need, however, a crisp output, that is we have to
defuzzify
is a fuzzy number as
well. For optimization we need, however, a crisp output, that is we have to
defuzzify ![]() . The level sets of any fuzzy number
. The level sets of any fuzzy number ![]() are closed intervals
on the real axis [4,6,7]. Denote them by
are closed intervals
on the real axis [4,6,7]. Denote them by ![]() for
for ![]() we can defuzzify
we can defuzzify ![]() by suited integral
means, e.g.
by suited integral
means, e.g.
 , (21)
, (21)
where the existence of the Rieman integral in (21) is
ensured by the monotonicity of ![]() .
.
Hence, now our model for the overall costs becomes
 (22)
(22)
with use of (19)-(20).
Results of optimization. All three models were investigated w.r.t. their bicriterial Pareto optims whereby the compromise function was used. As optimization method we applied Powell’s Direction Set Method [8], which is fairly efficient without using derivatives. Restriction (7) was taken into account as penalty.
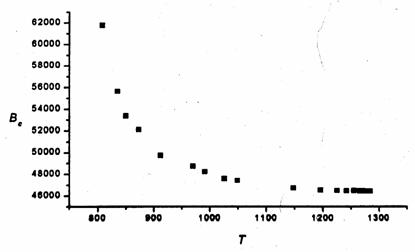
Retrospective
model. First we took α
uniformly distributed as shown in Fig.2
Fig.2 Pareto
set for the Retrospective model (uniformly distr. α)
One
sees that for T >1200 there is an
undesired accumulation of points. That is why the Pareto curve was approximated
by the following rational function [4]
with the coefficients
a =17427,85; b =
-7232071,5; c = -4207299e+9; d = 0,37878;
e = -147,213; f
= -106855,6.
The
corresponding α were determined
and we obtained the following Pareto set:
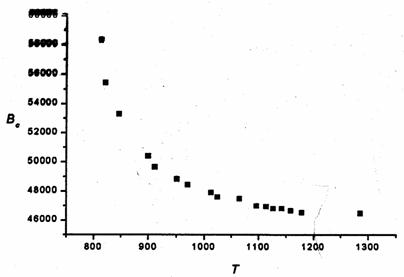
One realizes that the distribution is improved (far from being
ideal). The corresponding Pareto points are listed up in the below table (for
shortage of space we do not itemize the 45-dimensional solution vectors).
Fig.3 Pareto set for the model
Table 2.
|
i |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
T |
814 |
822 |
847 |
900 |
912 |
951 |
971 |
1013 |
1025 |
|
Bc |
58316 |
55432 |
53283 |
50393 |
49644 |
48819 |
48436 |
47905 |
47590 |
|
i |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
|
T |
1065 |
1096 |
1114 |
1127 |
1142 |
1159 |
1179 |
1186 |
|
Bc |
47464 |
46985 |
46935 |
46800 |
46796 |
46647 |
46511 |
46470 |
From
the decison-makers viewpoint most interesting seem to by points 4 ands 5,
because they indicate some break: onthe left-hand side we gain a lot for Bc with only small losses
w.r.t. T. Right from these points the
gain for Bc becomes rather
small while we have to note a greater loss of T.
Crisp operative model. Here we had to allow with more numerical difficulties due to the high nonlinearity of the functions involved. Hence, a smaller number of Pareto solutions was obtained .
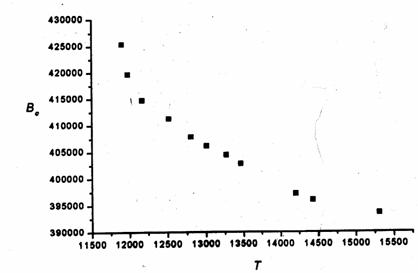
The corresponding data are contained in the
following table (again the solution vector of
dimension 30 is omitted).
Fig. 4 Pareto
set for the crisp operative mode
Table 3.
|
i |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
T |
11907 |
11986 |
12173 |
12522 |
12807 |
13010 |
13272 |
|
Bc |
425376 |
419672 |
414701 |
411259 |
407867 |
406148 |
404424 |
|
i |
8 |
9 |
10 |
11 |
|
T |
13468 |
14206 |
14429 |
15311 |
|
Bc |
402774 |
397144 |
395988 |
393535 |
Obviously, the neighbourhood of point 3 seems to be worth being investigated further.
Fuzzy operative model. The situation is
analogical to the previous one.
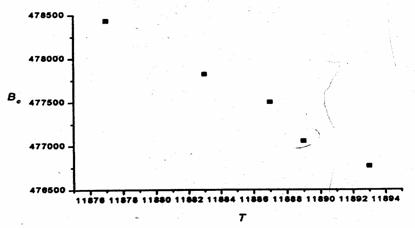
Fig. 5 Pareto
set for the fuzzy operative model
Notice, anyhow, that the evaluated
set of drilling time T is narrowed in
comparison with the crisp model what is due to the information submitted by the
experts.
Table 4.
|
i |
1 |
2 |
3 |
4 |
5 |
|
T |
11877 |
11883 |
11887 |
11889 |
11893 |
|
Bc |
478435 |
477821 |
477503 |
477054 |
476767 |
Here, point 4 is most interesting from the decision makers view point.
Summary.
In opposite to the classical approach of decision making in well-drilling that is based on objective
function, the method presented here enable to exploit the derived models in a
more efficient way w.r.t. finding “good solution”, i.e. preferable parameters for controlling the
process. With the help of the Pareto set one is able to determine compromisses
which are more satisfactory from user’s
point of view because the behaviour of drilling time and costs (w.r.t.
optimality) can be taken into account
simultaneously, The fuzzy model, however, turns out to be too coarse for final
decision making. Hence, a finer and more sophisticated partition of the time
and segmentation universums and the costs, as well, seems to be advisable to
get a more sensitive response function.
References
1. Maric V.B., Criganivsciy E.I., Dovgoc V.E., Gouc R.Y. Actual problem of roll-bit. Exploration and development of oil and gas deposits.–2003.–V. №2(7) .– P.109-113.
2. Furness R., Wu C., Ulsoy A. Statistical analysis of the effect of feed, speed and wear on hole quality in drilling. I Manufect SciEng ,1996.– P.367-375.
3. Chygur I, Fadyeyeva I, Sementsov G.. Application of fuzzy logic for the simulation of drilling tools wear process and short-term forecasting of well-drilling cost. Proc.10th Zittau Fuzzy Colloquium, Sept.4-6, 2002.–P. 173-177.
4. Das I., Dennis J.E. A closer look at drawbacks of minimizing weighted sums of objectives for Pareto set generation in multicriteria optimization problems. Price Univ., Houston, Texas. Working Paper, 1996.–12 p.
5. Ester J.. Systems Analysis and Multicriterial Decision Making (in German) VEB Verlag Technik, Berlin, 1987.
6.
Eschenamer H.,
7.
Koski I.. Multicriteria Truss
Optimization. Multicriteria Optimization in Engineering and in the Sciences.
Edited by Staler W..
8.
Press W.H. et al., Numerical
Recipes in