Технические
науки
6. Электротехника и радиоэлектроника
Аналіз
сучасного стану напівпровідникових
магнітних
сенсорів
Притула М.О., Осадчук О.В.,
Коваль К.О.
Сучасні
технології створення напівпровідникових конструкцій дозволяють мінімізувати
габарити сенсорів магнітного поля та підвищити їх чутливість. Це є досить
актуальним питанням в наш час, оскільки вплив змін магнітного поля Землі та
інших космічних тіл дуже сильно впливає на здоров’я людей.
Розглянемо
кілька найновіших та найдосконаліших сучасних напівпровідникових сенсорів
магнітного поля.
Большакова
І.А. та Голяка Р.Л. запропонували вимірювальний перетворювач магнітного поля який
використовує ефект Холла. У вимірювального перетворювача магнітного поля, який
містить сформовані на підкладці та перехрещені між собою дві прямокутні
напівпровідникові області вертикальних перетворювачів Холла, які утворюють
хрестовидну геометричну фігуру. Однією з особливих ознак даного перетворювача є
те, що товщина напівпровідникової області горизонтального перетворювача Холла
відрізняється від товщини напівпровідникових областей вертикальних перетворювачів
Холла. Введення нових елементів та додаткових зв'язків дозволяє створити
вимірювальний перетворювач магнітного поля, який забезпечує вимірювання трьох
ортогональних проекцій вектора індукції магнітного поля в єдиній просторовій
точці, тобто характеризується високою точністю вимірювання. Також даний сенсор
має просту конструкцію.
На
рисунку 1 зображена схема вимірювального перетворювача магнітного поля, де 1 -
підкладка; 2, 3, 4 та 5 - чотири плеча хрестовидної фігури, яка утворена
перехрещенням двох напівпровідникових областей вертикальних перетворювачів
Холла; 6, 7, 8 та 9 - струмові контакти; 10, 11, 12 та 13 - потенційні
контакти; 14 - напівпровідникова область горизонтального перетворювача Холла.
Перший
перетворювач призначений для вимірювання проекції ![]() вектора індукції
магнітного поля, а другий - для вимірювання проекції
вектора індукції
магнітного поля, а другий - для вимірювання проекції ![]() . Функціонування вимірювального перетворювача магнітного
поля згідно винаходу передбачає два режими живлення. Перший режим забезпечує
функціонування вертикальних перетворювачів холла, а другий - горизонтального.
. Функціонування вимірювального перетворювача магнітного
поля згідно винаходу передбачає два режими живлення. Перший режим забезпечує
функціонування вертикальних перетворювачів холла, а другий - горизонтального.
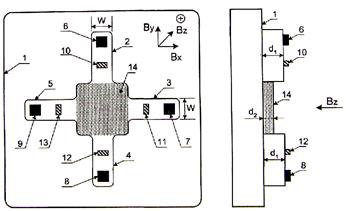
Рисунок 1 – Схема вимірювального перетворювача магнітного поля
з двома датчиками Холла
Підвищення
точності вимірювального перетворювача згідно винаходу по відношенню до аналогів
обумовлюється тим, що горизонтальний перетворювач Холла знаходиться в центрі
вертикальних перетворювачів Холла. Це забезпечує високу просторову суміщеність
всіх перетворювачів (двох вертикальних та одного горизонтального), а отже всі
три проекції ![]() та
та ![]() вектора
індукції магнітного поля вимірюються в єдиній просторовій точці. При
вимірюванні високо-градієнтних полів це дає зменшення похибки вимірювання
вектора індукції магнітного поля в декілька раз.
вектора
індукції магнітного поля вимірюються в єдиній просторовій точці. При
вимірюванні високо-градієнтних полів це дає зменшення похибки вимірювання
вектора індукції магнітного поля в декілька раз.
Спрощення
конструкції вимірювального перетворювача згідно винаходу по відношенню до аналогів
обумовлюється рядом обставин. По-перше, функція вимірювання трьох проекцій
магнітного поля реалізується одним перетворювачем, а не набором вертикальних
та горизонтальних перетворювачів. По-друге, значно зменшується кількість
виводів вимірювального перетворювача. У вимірювального перетворювача згідно
винаходу є лише 8 виводів, а в аналогів - 9 виводів у вертикальних
перетворювачах Холла та принаймні 4 виводи у горизонтального перетворювача
Холла. [1].
Осадчук О.В., Осадчук Е.С. та Осадчук В.С. запропонували датчик вимірювання
магнітної індукції в різноманітних пристроях автоматичного керування
технологічними процесами. В пристрій, який містить магніточутливий польовий
транзистор і джерело постійної напруги, введено два магніточутливих польових
транзистора, два резистора, дві ємності і друге джерело постійної напруги, що
дало змогу замінити перетворення магнітної індукції в напругу на перетворення
магнітної індукції у частоту. Використання запропонованого мікроелектронного
вимірювача магнітної індукції суттєво підвищує чутливість і точність вимірювання
інформативного параметру за рахунок виконання ємнісного елемента коливального
контуру на основі магніточутливих першого і другого польових транзисторів, а
індуктивного елементу коливального контуру на основі третього магніточутливого
польового транзистора разом із послідовним колом з другого резистора і першої
ємності. Лініаризація функції перетворення відбувається за рахунок вибору
напруги живлення.
Рисунок 2 – Вимірювач магнітної індукції
На рисунку
2 подано схему мікроелектронного вимірювача магнітної індукції. Пристрій
містить джерело постійної напруги 1, резистор 2, магніточутливі польові
транзистори 3 і 4, які з'єднані з магніточутливим польовим транзистором 5, у
якому до витоку і стоку підключене послідовне коло із ємності 6 і резистора 7.
Ємність 8 підключена паралельно другому джерелу постійної напруги 9. Вихід
пристрою утворений затвором магніточутливого польового транзистора 4 і
загальною шиною.
Мікроелектронний вимірювач магнітної індукції працює таким чином. В
початковий момент часу магнітна індукція не діє на магніточутливі польові
транзистори 3, 4 і 5. Підвищенням напруги джерела постійної напруги 1 і джерела
постійної напруги 9 до величини, коли на електродах стік-стік магніточутливих
польових транзисторів 3 і 4 виникає від'ємний опір, який приводить до виникнення
електричних коливань в контурі, який утворений паралельним включенням повного
опору з ємнісною складовою на електродах стік-стік магніточутливих польових
транзисторів 3 і 4 та повного опору з індуктивною складовою на електродах затвор-стік
магніточутливого польового транзистора 5. Резистор 2 здійснює електричне
живлення магніточутливих польових транзисторів 3 і 4, а ємність 8 запобігає
проходженню змінного струму через джерело постійної напруги 9. При наступній дії
магнітної індукції на магніточутливі польові транзистори 3, 4 і 5 змінюється
як ємнісна складова повного опору на електродах стік-стік магніточутливих
польових транзисторів 3 і 4, так і індуктивна складова повного опору на
електродах затвор-стік магніточутливого польового транзистора 5, що викликає
ефективну зміну резонансної частоти коливального контуру. Даний пристрій має досить велику лінійну функцію передачі та
підвищену точність вимірювання магнітної індукції. Недоліком даного пристрою є
те, що він вимірює лише певну складову магнітної індукції[2].
Большакова
І.А. та Голяка Р.Л. створили багатопозиційний 3-D сенсор
магнітного поля, в якому розширені функціональні можливості, підвищена
просторова роздільна здатність та точність вимірювання. Даний багатопозиційний
3-D сенсор магнітного поля, який містить декілька однакових
вимірювальних перетворювачів, кожний з яких містить підкладку з сформованими
на ній напівпровідниковою областю та контактами до неї, причому підкладки перетворювачів
розміщені в різних площинах. Згідно винаходу, сенсор містить шість
перетворювачів, які утворюють шість сторін куба, причому напівпровідникові
області перетворювачів розміщені по периметру підкладок, а контакти - в
центральній частині підкладок.
Введення
нових елементів та відповідних зв'язків дозволяє створити багатопозиційний 3-D сенсор
магнітного поля, чутливі зони вимірювальних перетворювачів якого розміщені
вздовж ребер та у вершинах куба, утвореного підкладками цих перетворювачів.
При цьому контакти (контактні площадки) розміщені в центральних частинах
підкладок. Така конструкція дозволяє сформувати набір сенсорів, чутливі зони
яких розміщені в різних площинах. Принципово важливою перевагою є те, що, на
відміну від аналога, в кожному з сформованих таким чином сенсорів чутливі зони
знаходяться в безпосередній близькості одна до іншої, наприклад на ребрі чи
вершині куба. Це забезпечує високу просторову роздільну здатність вимірювання
трьох проекції ![]() вектора індукції
магнітного поля, що є основою високої точності подальшого розрахунку цього
вектора. Крім того, чутливі зони сенсорів можуть бути максимально наближеними
до об'єкту дослідження, що також підвищує просторову роздільну здатність та точність
вимірювання при дослідженні при поверхневих магнітних полів. Особливу
ефективність можна отримати, використовуючи в ролі чутливих зон частини напівпровідникових
областей, які знаходяться у вершинах куба. В кожній з восьми вершин куба
напівпровідникові області трьох суміжних ортогональне розвернутих
перетворювачів формують кутовий 3-D сенсор. Таким
чином, в одному кубі багатопозиційного 3-D сенсора
магнітного поля реалізується вісім кутових 3-D
сенсорів, з допомогою яких є можливим вимірювати градієнт вектора магнітного
поля по трьох просторових координатах. Можливий варіант схеми одного з шести
взаємно тотожних вимірювальних перетворювачів, підкладки яких утворюють шість
сторін куба наведений на рисунку 3. На даному рисунку позначено: 1 - підкладка;
2 - область напівпровідникового шару; 3, 4, 5, 6, 7, 8, 9 та 10 - контакти.
Розміщення точок вимірювання зображено на рисунку 4.
вектора індукції
магнітного поля, що є основою високої точності подальшого розрахунку цього
вектора. Крім того, чутливі зони сенсорів можуть бути максимально наближеними
до об'єкту дослідження, що також підвищує просторову роздільну здатність та точність
вимірювання при дослідженні при поверхневих магнітних полів. Особливу
ефективність можна отримати, використовуючи в ролі чутливих зон частини напівпровідникових
областей, які знаходяться у вершинах куба. В кожній з восьми вершин куба
напівпровідникові області трьох суміжних ортогональне розвернутих
перетворювачів формують кутовий 3-D сенсор. Таким
чином, в одному кубі багатопозиційного 3-D сенсора
магнітного поля реалізується вісім кутових 3-D
сенсорів, з допомогою яких є можливим вимірювати градієнт вектора магнітного
поля по трьох просторових координатах. Можливий варіант схеми одного з шести
взаємно тотожних вимірювальних перетворювачів, підкладки яких утворюють шість
сторін куба наведений на рисунку 3. На даному рисунку позначено: 1 - підкладка;
2 - область напівпровідникового шару; 3, 4, 5, 6, 7, 8, 9 та 10 - контакти.
Розміщення точок вимірювання зображено на рисунку 4.
Рисунок 3 – Можливий варіант схеми одного вимірювального
перетворювача магнітного поля.
При
кожному вимірюванні використовуються три рядом розміщені контакти. З них два
крайні контакти використовуються як струмові контакти, а середній - як
потенційний контакт. Через струмові контакти пропускають струм живлення, а на
потенційному вимірюють вихідну напругу. В такому використанні ці контакти та
напівпровідникова область між ними служать Холлівським півелементом.
Рисунок 4 - Розміщення точок вимірювання
багатопозиційного 3-D сенсора
магнітного поля.
Інформативною
складовою вихідної напруги є лише холлівська напруга, яка обумовлена відхиленням
траєкторії рухомих носіїв заряду в напівпровідниковій області під дією сили
Лоренца.
Унікальною
особливістю багатопозиційного 3-D сенсора згідно
винаходу є те що він містить вісім розподілених по трьох просторових
координатах кутових 3-D сенсорів. Це
розширює функціональні можливості останнього, забезпечуючи вимірювання
градієнту магнітного поля в трьохвимірному просторі. Причому відстані між
кутовими 3-D сенсорами (вершинами кубу) може бути
як завгодно малою. Типово ця відстань знаходиться в межах від одного до
декількох міліметрів.
Конструкція такого перетворювача дозволяє наблизити його активні частини
безпосередньо до поверхні досліджуваного магнітного об'єкту. Все це
забезпечує підвищення принаймні на порядок точність вимірювання високо
градієнтних при поверхневих магнітних полів [3].
Большакова
І.А., Гумен С.С., Мороз А.П., Московець Т.А. запропонували магнітний
мультисенсор, який містить лінійку з кількома мікродатчиками, електрично
з'єднаними між собою, з холлівськими електродами, розміщеними на бокових гранях
попарно на фіксованій відстані один відносно другого, і струмовими електродами,
розміщеними на торцевих гранях, згідно з винаходом, виконаний в єдиному
напівпровідниковому ниткоподібному монокристалі.
Виконання
магнітного мультисенсора в єдиному напівпровідниковому ниткоподібному монокристалі
дає можливість підвищити його надійність за рахунок спрощення конструкції, в
зв'язку з тим, що наявність єдиного ниткоподібного монокристалу, на основі якого
сформовані мікродатчики, забезпечує їх послідовне включення по струму безпосередньо
в монокристалі, що виключає можливість виходу з ладу магнітного мультисенсора
за рахунок пошкодження ланки живлення одного з елементів.
Наявність
єдиного ниткоподібного мікромонокристалу, вирощеного методом газотранспортних
реакцій, який являється чутливим елементом в магнітному мультисенсорі,
забезпечує більш стабільні параметри останнього за рахунок досконалості
кристалічної структури, поверхні та однорідного складу чутливого елементу.
Технологічне
виконання магнітного мультисенсора в єдиному ниткоподібному монокристалі дає
можливість знизити трудоємкість його виготовлення за рахунок того, що вирощені
методом газотранспортних реакцій монокристали, на основі яких формуються
мікродатчики, відзначаються структурною досконалістю і дзеркальною поверхнею і
не потребують жодної механічної обробки.
Напівпровідниковий
ниткоподібний монокристал 1 являє собою лінійку з кількома мікросенсорами,
електричне з'єднаними між собою, струмовими електродами 2, розміщеними на
торцевих гранях ниткоподібного монокристалу, та холлівськими електродами 3 - 8,
розміщеними попарно на бокових гранях ниткоподібного монокристалу на фіксованій
відстані один відносно другого.
Рисунок 5 – Магнітний мультисенсор
Крім
того, конструктивне виконання магнітного мультисенсора в єдиному
напівпровідниковому ниткоподібному монокристалі дає можливість зменшити його
габарити, оскільки запропоноване технічне рішення виключає наявність
керамічної підкладки, забезпечуючи таким чином вимірювання градієнтів
магнітного поля в малих об'ємах та вузьких щілинах магнітних систем.
Реалізація
пропонованого технічного рішення в порівнянні з відомими пристроями має
наступні техніко-економічні переваги і дає можливість:
•
забезпечити стабільність його параметрів за рахунок однорідності складу
чутливого елементу, характерного для ниткоподібних монокристалів, вирощених
методом газотранспортних реакцій;
•
підвищити його надійність в роботі за рахунок спрощення конструкції;
•
знизити трудоємкість його виготовлення та одночасно підвищити якість чутливого
елементу за рахунок того, що вирощені методом газотранспортних реакцій
монокристали відзначаються структурною досконалістю в зв'язку з відсутністю
хімічних операцій та подальшої механічної обробки, яка негативно впливає як на
якість поверхні монокристалу, так і на якість його структури;
• створити більш економічну конструкцію, що
зумовлено відсутністю втрат напівпровідникового матеріалу в процесі
виготовлення датчика (безвідходне виробництво) [4].
Таким
чином, всі сучасні досягнення в області вимірювання складових магнітного поля
спрямовані на підвищення чутливості магнітних сенсорів та методів перетворення
вимірювальних сигналів з датчиків магнітного поля. Кожен з розглянутих
винаходів має ряд переваг. Наприклад, вимірювач на польових магніточутливих
транзисторах формує сигнал, інформація про рівень магнітного поля в якому передається
в частоту. А як добре відомо частоту поміряти з великою точністю нескладно,
тому це є досить перспективне рішення для вимірювання. Але даний пристрій не
створює інформативних даних про всі три складові вектора магнітної індукції. Цю
задачу досить легко вирішує багатопозиційний 3D-сенсор, який
створює картину магнітного поля в тривимірному просторі. Перевагами всіх
напівпровідникових датчиків магнітного поля є малі габарити та досить велика
точність у порівнянні з іншими методами вимірювання складових магнітного поля.
Використанні
джерела:
1. Пат.
№76132 С2 України, МКИ G01R
33/06. Вимірювальний перетворювач магнітного поля / Большакова І.А., Голяка
Р.Л. - №2003076517; Заявлено 11.07.2003; Опубліковано 17.07.2006. Бюл. №7.
2. Пат.
№41013 А України, МКИ H01L 29/82.
Мікроелектронний вимірювач магнітної індукції / Осадчук В.С., Осадчук О.В. -
№2001010065; Заявлено 03.01.2001; Опубліковано 15.08.2001. Бюл. №8.
3. Пат.
№74628 С2 України, МКИ H01L 43/00.
Багатопозиційний 3-D-сенсор магнітного поля / Большакова І.А., Голяка Р.Л. -
№2003098632; Заявлено 22.09.2003; Опубліковано 16.01.2006. Бюл. №1.
4. Пат.
№52637 С2 України, МКИ G01R 33/06.
Магнітний мультисенсор / Большакова І.А., Гумен С.С., Мороз А.П., Московець
Т.А. - №98073795; Заявлено 14.07.1998; Опубліковано 15.01.2003. Бюл. №1.