Технические науки/ Авиация и космонавтика
Dr Nickolay Zosimovych
Shantou University, Shantou, China
INCREASING THE ACCURACY OF THE CENTER OF MASS STABILIZATION OF SPACE
PROBE
Keywords: Space probe (SP), stabilization controller (SC), on-board computer (OC),
gyro-stabilized platform (GSP), propulsion system (PS), angular velocity sensor
(AVS), operating device (OD), space vehicle (SV), feedback (FB), control
actuator (CA), control system (CS), angular stabilization (AS), center of mass
(CM).
I. Introduction. In some cases, when using a control
system built according to the principle of program control (the "robust
trajectories" method) the efficiency of task solution is much influenced
by the accuracy of the spacecraft stabilization system in the powered portion
of flight. This concerns, for example, the trajectory correction phases during
interplanetary and transfer flights, when the rated impulse execution errors
during trajectory correction resulting from various disturbing influences on
the spacecraft in the active phase, greatly affect the navigational accuracy.
Hence, reduction of the cross error in the control impulse on the final
correction phase during the interplanetary flight, facilitates almost
proportional reduction of spacecraft miss in the "perspective plane".
For example, in some space probes (SP) like Deep Impact [1, 2] and Rosetta
missions [3, 4] reduction of cross error by one order during the execution of
correction impulse (for modern stabilization systems this value shall be ![]()
![]() results in
reduction of spacecraft miss in the "perspective plane" from 200 to
20
results in
reduction of spacecraft miss in the "perspective plane" from 200 to
20 ![]() Such
reduction of the miss accordingly
increases a possibility of successful implementation of the flight plan, as well
as the accuracy of the research and experiments conducted [5].
Such
reduction of the miss accordingly
increases a possibility of successful implementation of the flight plan, as well
as the accuracy of the research and experiments conducted [5].
The
Martian Moons Exploration (MMX) mission is scheduled to launch from the Tanegashima Space Center in September 2024. The spacecraft
will arrive at Mars in August 2025 and spend the next three years exploring the
two moons and the environment around Mars. During this time, MMX will drop to
the surface of one of the moons and collect a sample to bring back to Earth.
Probe and sample should return to earth in the summer 2029 [6].
Objectives: to
solve the task of significant increase in stabilization accuracy of center of
mass tangential velocities during the trajectory correction phases when using
the "rigid" trajectory control principle.
Subject of research:
The center of mass movement stabilization system in the transverse plane, which
is used during the trajectory correction phases.
In order the control actions could be created during the spacecraft
trajectory correction phase, a high-thrust service propulsion system with a
tilting or moving in linear direction combustion chamber shall be used.
II. Content of the
Problem. Functioning
of the spacecraft movement stabilization channel in the transverse plane is
based on the feedback principle, and together with the spacecraft this channel
forms a closed deviation control system. We can consider two channels in this
control system: an angular stabilization channel and center of mass movement
stabilization channel (Fig. 1).
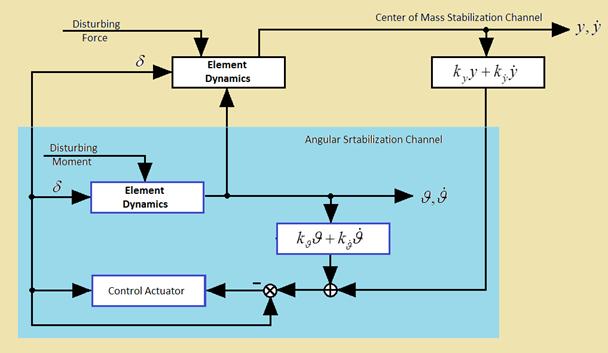
Fig. 1. Functional diagram of model
spacecraft stabilization
The angular stabilization channel facilitates angular position of the
spacecraft when exposed to disturbing moments. The center of mass movement
stabilization channel is to ensure proximity to zero of normal![]() and lateral
and lateral![]() velocities of
the spacecraft under the influence of disturbing moments and forces. In most of
the known (model) spacecraft stabilization systems [7-9] the control signal in
the center of mass movement stabilization channel is generated according to
proportional plus integral control law based on the measurements of tangential
velocity of the center of mass
velocities of
the spacecraft under the influence of disturbing moments and forces. In most of
the known (model) spacecraft stabilization systems [7-9] the control signal in
the center of mass movement stabilization channel is generated according to
proportional plus integral control law based on the measurements of tangential
velocity of the center of mass ![]() and its
integral-linear drift
and its
integral-linear drift ![]() In the angular stabilization channel, the control
signal shall be generated in proportion to the spacecraft deviation angle in
the transverse plane
In the angular stabilization channel, the control
signal shall be generated in proportion to the spacecraft deviation angle in
the transverse plane ![]() and the angular
velocity of the spacecraft rotation in this plane
and the angular
velocity of the spacecraft rotation in this plane ![]()
The required dynamic accuracy of
stabilization of tangential velocities in this system shall be achieved through
the choice of the gain in the stabilization controller ![]() If the
requirements to the accuracy of center of mass movement stabilization are
stiff, the coefficients
If the
requirements to the accuracy of center of mass movement stabilization are
stiff, the coefficients ![]() and
and ![]() shall be
necessarily significantly increased [7]. However, if these coefficients are
increased up to desired saturation, the system shall loose its motion
stability, and further improvement of the accuracy of the spacecraft center of
mass movement stabilization shall be impossible when this method of control is
applied. This can be explained by the fact that the increase in the gain values
in the center of mass movement stabilization channel results in improved
performance of the channel, and the frequencies of the processes occurring in
it become close to the frequencies of the angular stabilization channel, which
fact enhances interaction of these two
channels and makes it impossible to significantly improve the stabilization
accuracy of the spacecraft center of mass tangential velocities in the control
system concerned.
shall be
necessarily significantly increased [7]. However, if these coefficients are
increased up to desired saturation, the system shall loose its motion
stability, and further improvement of the accuracy of the spacecraft center of
mass movement stabilization shall be impossible when this method of control is
applied. This can be explained by the fact that the increase in the gain values
in the center of mass movement stabilization channel results in improved
performance of the channel, and the frequencies of the processes occurring in
it become close to the frequencies of the angular stabilization channel, which
fact enhances interaction of these two
channels and makes it impossible to significantly improve the stabilization
accuracy of the spacecraft center of mass tangential velocities in the control
system concerned.
To improve the correction accuracy, the following additional algorithm
shall be used in practice [9, 10].
The position of the steering control (turning PS) at the end of the previous
active phase shall be memorized and set in its original position before PS is
activated during next correction. The improvement of accuracy in this case
shall be achieved by partial compensation of the main disturbing factors:
eccentricity and thrust misalignment in the propulsion system already in the
initial moment of operation of the propulsion system. This algorithm is based
on the assumption that eccentricity and thrust misalignment in PS change
slightly towards the end of the active phase during the previous correction,
and PS setting before a new active phase sets in progress, ensures that the
thrust vector goes approximately through the center of mass of the spacecraft,
thereby considerably offsetting the disturbing moment. A similar algorithm was
applied in the stabilization system of the Apollo spacecraft [11].
It should be pointed out that the process of implementation of the
described algorithm is confronted by a number of challenges [5]:
·
Difference in disturbing factors
(moments and forces) during the previous and subsequent corrections results in
additional errors in the stabilization of the tangential velocities of the
spacecraft center of mass.
·
Due to the limited time of the active
phase, deactivation of PS during the previous correction may occur even before
the completion of the transition processes in the stabilization system, and as
a result, the system will remember the deviation of the steering control, which
was not final.
Besides introduction of additional control algorithms, there are other
ways to increase the accuracy of the center of mass movement stabilization. It
is a commonly known fact that one of the ways to achieve high accuracy in
automatic control systems, is to use the so-called invariant theory [12-14].
One of the problems inherent in the synthesis of invariant control
systems, is the ability for the implementation of such systems in most cases
through the use of the deviation control principle, as the simplest one and
most widely used in practice. The publications [15-18] consider the possibility
of constructing an invariant deviation control system with one adjustable
parameter including an inertial element and a servo control with feedback. The
general provisions of the invariant theory prove that no absolutely invariant
system can be implemented in this case because this requires that the circuit
with feedback should have an infinitely great gain.
As a rule, most invariant control systems are based on the use of the
information about external influences. Such control systems belong to the class
of combined regulatory systems. In particular, the combined systems constitute
the majority of invariant systems [19-25].
There is still another method to enforce implementation of invariance
conditions without application of combined regulatory techniques [26]. This
method is based on the dual-channel principle, which means that in order to
ensure the absolute invariance of some adjustable value towards external
influence, invariance with respect to the above influence should be ensured
between the point of influence application and the measuring point. To
implement such a system, it is necessary that two influence distribution
channels should be present in the controlled element.
In order to improve the accuracy of the synthesized algorithms, we
propose the application of self-configuring elements, which turn the operating
device and X-axis of the spacecraft at angles recorded at the end of the
previous active phase before a new active phase begins. The use of the above self-configuring
elements in the synthesized invariant algorithms produces the maximum effect in
increasing of the dynamic accuracy of tangential velocities stabilization as
compared to similar techniques in the existing systems. This is due to the fact
that the dynamic error of drift velocity in the synthesized algorithms, shall
be largely determined by the initial conditions of the transition process due
to the partial invariance of the algorithms proposed, which with the help of
the mentioned self-configuring elements, can approach the values corresponding
to the established mode as close as possible.
The publication provides analysis of stability of the synthesized
control algorithms, proves availability of stability margins in partially
invariant systems sufficient for practical implementation [5].
We propose an algorithm for selection of parameters of the stabilization
controller, which facilitates minimization of maximum error during
stabilization of the tangential velocity of the spacecraft center of mass while
ensuring adequate stability margins in the system.
Conclusion. The
publication provides analysis of stability of the synthesized control
algorithms, proves availability of stability margins in partially invariant
systems sufficient for practical implementation.
We propose an algorithm for selection of
parameters of the stabilization controller, which facilitates minimization of
maximum error during stabilization of the tangential velocity of the spacecraft
center of mass while ensuring adequate stability margins in the system.
References
1.
Deep Impact Launch. Press Kit, January, 2005, NASA,
USA.
2.
William H. Blume. Deep Impact Mission Design. Springler, Space Science Reviews, 2005, PP. 23-42.
3. Matt Taylor. The Rosetta mission, ESA, 2011.
4.
Verdant M., Schwehm G.H.
The International Rosetta Mission, ESA Bulletin, February, 1998.
5. Nickolay Zosimovych,
Modeling of Spacecraft Centre Mass Motion Stabilization
System. International Refereed Journal of Engineering and Science (IRJES), Volume 6, Issue 4 (April 2017), PP. 34-41.
6.
https://www.cosmos.esa.int/documents/653713/1000951/01_ORAL_Yamamoto.pdf/c0143f57-5863-46da-bc00-e32e88be08a6
- Yamamoto, M.-Y., Observation plan for Martian meteors by Mars-orbiting MMX
spacecraft. April, 11, 2017.
7.
Управление и наведение беспилотных маневренных
летательных аппаратов на основе современных информационных технологий / Под
ред. М.Н. Красильщикова и Г.Г. Себрякова.
– М.: ФИЗМАТЛИТ, 2003, 280 с.
8. Статистическая динамика
и оптимизация управления летательных аппаратов: Уч. Пособие для вузов / А.А.
Лебедев, В.Т. Бобронников, М.Н. Красильщиков и др. -
М.: Машиностроение, 1985. - 280 с.
9. Стаббс Г., Пинчук А., Шлюндт Р. Цифровая Система стабилизации космического
корабля “Аполлон”. – Вопросы ракетной техники, 1970, No 7.
10.
Справочное руководство по небесной
механике и астродинамике / Абалакин В.К., Аксенов
Е.П., Гребеников Е.А. и др. Изадание
2-е, Наука, 1976, 864 с.
11.
Robert G.
Chilton. Apollo Spacecraft Control Systems, NASA Manned Spacecraft Control
Houston, Texas, USA, 1965.
12.
Jan Willem Polderman, Jan C. Willems. Introduction to Mathematical
Systems Theory: A Behavioral Approach (Texts in Applied Mathematics), Springer;
2nd edition (October, 2008), 455 p.
13.
Spasskii R. A. Invariance of a system of automatic control,
Journal of Soviet Mathematics, June 1992, Volume 60, Issue 2, PP. 1343–1346.
14.
Bassam Bamieh, Fernando Paganini, Munther
A. Dahleh. Distributed Control of Spatially Invariant
Systems, IEEE Transactions on Automatic Control, Vol. 47, No. 7, July 2002, PP.
1091-1107.
15.
Репин А.И. Теория
автоматического управления (Конспект лекций), Можайск, 2011, 150 с.
16.
Бейнарович
В.А. Инвариантные системы автоматического управления с релейным усилителем,
Доклады ТУСУРа, №2 (21), Часть 1, Июнь 2010, СС.
70-73.
17.
Richard C. Dorf,
Robert H. Bishop. Modern Control Systems, Pearson, 12th edition, 807
pp.
18.
Silvia
Ferrari, Robert F. Stengel. Online Adaptive Critic Flight Control, Journal of
Guidance, Control, and Dynamics, Vol. 27, No 5, September-October, 2004, PP.
777-786.
19.
The
Electronics Engineer’s Handbook, 5ty Edition McGraw-Hill 19, 2005, pp.
19.1-19.30.
20.
Polderman J.W., Willems J.C. Introduction to the
Mathematical Theory of Systems and Control, 458 pp.
21.
Feron E., Brat G., Garoche P-L.,
Manolios P., and Pantel M. Formal methods for aerospace applications. FMCAD
2012 tutorials.
22.
Colon M, Sankaranarayanan S., and Sipma
H.B. Linear invariant generation using non-linear constraint solving. In Proc.
CAV, LNCS, PP. 420-432. Springler, 2003.
23.
Souris J.,
Favre-Felix D. Proof of properties in avionics. In Building the Information Society,
Vol. 156, pp. 527-535. Springler, 2004.
24.
Hennet J.C., Trabuco Dorea Carlos
E. Invariant Regulators for Linear Systems under Combined Input and State
Constraints. Proc. 33rd Conf. of Decision and Control (IEEE-CDC’94),
Lake Buena Vista, Florida USA, Vol. 2, pp. 1030-1036.
25.
Amaria Luca, Pedro Rodriguez, and Didier Dumur. Invariant sets method for state-feedback control
design, 17th Telecommunications forum TELEFOR 2009, Serbia, Belgrad, November 24-26, PP. 681-684.
26.
Gazanfar Rustamov. Invariant
Control Systems of Second Order, IV International Conference “Problems of
Cybernetics and Informatics” (PCI’2012), September 12-14, 2012, Baku, PP.
22-24.