UDC 621.317
1, 2О. М. Vasilevskyi,
Ph. D. in
information-measuring systems, docent
Method of evaluating the
characteristics of measurement accuracy of moment of inertia of electric motors
1Ministry education and science of Ukraine
2Vinnytsia national technical
university
Е-mail: wasilevskiy@mail.ru
Abstract. Proposed a
method for evaluating the characteristics of accuracy allows the transformation
equations based on analytical expressions for the additive and multiplicative
errors and explore their characteristics change depending on the different
values of the measurement range and influencing parameters.
Keywords: accuracy
of measurement, method of estimation accuracy, moment of inertia, electric
motor.
Statement of the problem. In tests
electric motor on regulatory compliance a key parameter is the rotational
moment of inertia. Based on the moments of inertia are calculated many other
rotational parameters of an electric motor (EM). The most important of these
are dynamic moment, the moment of resistance, and so on [1].
The development of measurement and study of
their metrological characteristics is an actual scientific problem for every
exact measurement (test), especially during the tests, the EM and the study of
their quality. In this regard, there is a need to develop a qualitatively new
means of measurement (MM), the moment of inertia, which correspond to the
modern development of science and technology, as well as studies of their basic
metrological parameters for the synthesis of this type of MM from normalized
metrological characteristics.
Analysis of research and publications. Given the
well-known analytical expression for finding the moment of inertia, which is
given in references [1, 2], we write the transformation of MM inertia as
 ,
(1)
,
(1)
where
NJ – number of pulses at
the input timer-counter MM moment of inertia for a time interval of free oscillations
of the rotor EM (initial value); Мk – torque at slip S = 1, which is described by Kloss [1]; l – length of the measuring arm; x- modulus of
elasticity of the membrane sensor efforts (SE); h – thickness of the membrane
SE; e = 0.17; r - the radius of the membrane SE; С – stiffness SE; ![]() – Normalized value
absolute error transducer (in particular, the accuracy SE); J – moment of
inertia is measured (input value); Р – coefficient of damping; T0 –
period model pulses, which is filled with time measurement of the moment of
inertia after the completion of the transition process (with and without power
and electric motor torque reduction of the value of Мk to zero).
– Normalized value
absolute error transducer (in particular, the accuracy SE); J – moment of
inertia is measured (input value); Р – coefficient of damping; T0 –
period model pulses, which is filled with time measurement of the moment of
inertia after the completion of the transition process (with and without power
and electric motor torque reduction of the value of Мk to zero).
The aim is to create models of basic
metrological static characteristics of MM inertia and research on the basis of
their metrological characteristics that will identify the reasons for the
increased errors, correct them by taking into account deviations investigated
and synthesized MM inertia with normalized metrological characteristics.
Findings.
In operating conditions pollutants inertia carries functional
transformation informative parameter J (moment of inertia) to the number of
pulses, which are calculated over a time interval meter free vibration rotor EM
NJ. In addition to an informative signal on him are influencing
variables which include all the other parameters that have a direct connection
with the original value and attract emergence uninformative component
transformation. From equation of (1) that the process of converting information
parameter J in output affects a large number of influencing factors. But due to
the fact that almost all the values are the
same, and shall be measured at the EM deenergized when the value of the torque
value changes from Мk to zero, then
it is reasonable to study the torque is affected as the influence quantity on
the measured moment of inertia (information parameter).
To obtain metrological models of basic static characteristics of MM
inertia expand transformation equation (1) in a Taylor series, which will take
the form

 , (2)
, (2)
where ![]() - free term
of the expansion of space equal to the output signal at zero input value (
- free term
of the expansion of space equal to the output signal at zero input value (![]() = 0 for J = 0);
= 0 for J = 0); ![]() -
Sensitivity MM inertia (SJ);
-
Sensitivity MM inertia (SJ);
![]() -
Changing the MM of inertia (
-
Changing the MM of inertia (![]() );
); ![]() - The rate
of change of sensitivity MM moment of
inertia (
- The rate
of change of sensitivity MM moment of
inertia (![]() );
); ![]() - The combined effect
of the influence quantity the rated sensitivity (
- The combined effect
of the influence quantity the rated sensitivity (![]() );
); ![]() - Change (deviation)
of the normalized influence quantity (graded) torque Мk;
- Change (deviation)
of the normalized influence quantity (graded) torque Мk; ![]() - influence factor affecting
the value to the output (
- influence factor affecting
the value to the output (![]() );
); ![]() - The rate of change
of the coefficient of influence affecting the value on the output signal (
- The rate of change
of the coefficient of influence affecting the value on the output signal (![]() ).
).
Analytical expression for the sensitivity
characteristics of MM research inertia
is given by
 . (3)
. (3)
Metrological additive
model error in the changing influence quantity Мk by value (value) ![]() is the sum of the
last two terms of the Taylor series, presented in equation (2) and is described
by the following analytical expression
is the sum of the
last two terms of the Taylor series, presented in equation (2) and is described
by the following analytical expression
 . (4)
. (4)
Metrological model
multiplicative uncertainty in the changing influence quantity Мk to the value (value) ![]() is the fifth term of
the Taylor series, which is represented in equation (2) and is described by the
product of the combined effect of to reject the influence quantity
is the fifth term of
the Taylor series, which is represented in equation (2) and is described by the
product of the combined effect of to reject the influence quantity ![]() the normalized value
and the input value (moment of inertia J)
the normalized value
and the input value (moment of inertia J)
![]()
![]() . (5)
. (5)
On the basis of
metrological models can investigate their properties by changing the nominal
values impact the variables at
different measurement ranges, as well as rejected options impact the values of the nominal values. Characteristics of
additive and multiplicative changes of errors since the measuring device and
are shown in Figures 1 - 2.
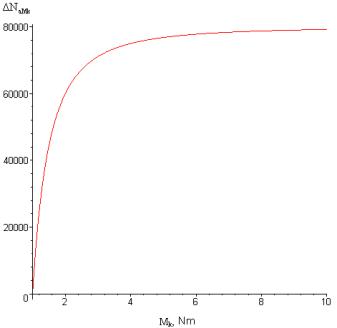
Figure 1 - Characteristic changes
of the additive error
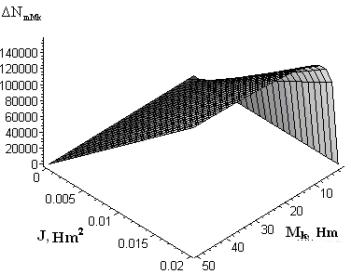
Figure 2 - Surface changes
multiplicative error MM moment of
inertia in changing influence quantity Мk:  - the number of pulses, the
latter corresponding to the multiplicative error; J - moment of inertia; Мk – torque
- the number of pulses, the
latter corresponding to the multiplicative error; J - moment of inertia; Мk – torque
Conclusions. Proposed a
method for evaluating the characteristics of measurement accuracy, which allows
on the basis of the Taylor series expansion transformation equations to obtain
metrological chuvstvistvitelnosti models, additive and multiplicative errors.
On the basis of these models can be synthesized by means of measurements with
valuations metrological characteristics.
Literature
1. Vasilevskyi O.M. Means for
measuring the dynamic torque electric motors and an analysis of its accuracy //
Vymiriuvalna tekhnika ta metrologiia. - № 73. – 2012. – P. 52 – 56. (Ukr.).
2. Vasilevskyi O. M. Advanced mathematical model of measuring the starting
torque motors // Tekhnichna elektrodinamika. – 2013. – № 6. – P. 76 –
81. (Ukr.).
3. Vasilevskyi O.M. Researches
of metrology descriptions of mean measuring of moment inertia rotors
electromotors // Proceedings of National Aviation University. –
2013. - № 2. – Р.
57 – 61. (Ukr.).