Tехнические науки/ Авиация и космонавтика
Nickolay Zosimovych
Instituto Tecnólogico de Monterrey (Campus
Gualajara, Mexico)
INTEGRATED GUIDANCE SYSTEM OF A COMMERCIAL LAUNCH VEHICLE
In the article has been chosen and modeled the design objectives for an integrated guidance
system of a commercial launch vehicle with application of GPS technologies. Was set the conceptual design of an integrated
navigation system for the space launch
vehicle qualified to inject
small artificial Earth satellites
into low and medium circular orbits. The conceptual design of the
integrated navigation system based on
GPS technology involves determination of
its structure, models and
algorithms, providing the required accuracy and reliability in injecting payloads with
due regard to restrictions on
weight and dimensions of the system.
Keywords: Gimbaled inertial navigation
system (GINS), global positioning system (GPS), inertial
navigation system (INS), mathematical model (MM), navigation, pseudorange,
pseudovelocity, launch vehicle, self-guided system (SGS), Kalman filter, control loop, control system (CS), trajectory, boost phase (BPH), distributor, coordinate, orientation.
Introduction. A key tendency in the development of affordable modern navigation systems is displayed by the
use of integrated GPS/INS navigation
systems consisting of a gimbaled inertial
navigation system (GINS) and a multichannel
GPS receiver [1]. The
investigations show [2, 3], that such systems of navigation sensors with their relatively low cost are able to provide the required accuracy of navigation for a wide class of highly maneuverable objects,
such as airplanes, helicopters, airborne
precision-guided weapons, spacecraft, launch vehicles and recoverable orbital carriers.
Problem setting. The study of applications of GPS navigation technologies
for highly dynamic objects ultimately comes to solving the following problems [4]:
1. Creation
of quality standards (optimality criteria) for solving the navigation task
depending from the type of an object, its trajectory characteristics and restrictions on the
weights, dimensions, costs, and reliability
of the navigation system.
2. Choosing and justification of the
system interconnecting the
GPS-receiver and GINS: uncoupled, loosely coupled, tightly coupled (ultra-tightly coupled).
3. Making
mathematical models (MM) of an object's motion, including models of external
factors beyond control influencing object (disturbances). This requires to make two types of object models: the most detailed and complete one,
which will be later included in the model of the environment when simulating the operation of an integrated system, and a so-called on-board model, which is much simpler and more compact
than the former one, and which will be used
in the future to solve the navigation problem being a part of the
on-board software.
4. Making MM
for GINS in consideration of use of gyroscopes and accelerometers (i.e. it is required to make a model for navigation measurements supplied by GINS, taking into account systematic (drift) and
random measurement errors).
5. Making a model of the navigation field of GPS,
including system architecture, a method of calculating ephemeris of
navigation satellites in
consideration of possible errors, clock drifts on board the navigation satellites,
and taking into account conditions of geometric visibility of a navigation satellite on
different parts of the trajectory of a highly dynamic object.
6. Making a model of a multichannel GPS receiver, including models of code measurements (pseudorange and pseudovelocity) and, if necessary, phase measurements, including the whole range of chance and indeterminate factors beyond control, existing when such measurements are conducted (such as multipath effect).
7.
Choosing an algorithm to process measured data in an
integrated system in agreement with the speed-of-response requirement (the
possibility to process data in real time) and demanded accuracy in solving a
navigation task.
8. Creating an object-oriented computer complex for the implementation of the above models and algorithms with the objective to model the process of functioning of the integrated navigation system of a highly dynamic object.
Let's consider the
above objectives, having regard to peculiarities of the subject of inquiry,
namely a commercial launch vehicle, designed to launch payloads into low Earth
orbit (LEO) or geostationary orbit (GSO), in more
details.

Fig. 1. Launch vehicle Vega (Vettore Europeo di Generazione Avanzata, ASI&ESA) [5]
Within the framework of this study we shall consider a
light launch vehicle which has been jointly developed by the European Space
Agency (ESA) and the Italian Space Agency (ASI) since 1998 (Fig.1) [5]. It is qualified to launch satellites ranging
from 300 kg to 2000 kg into low circular polar orbits. As a rule, these are low
cost projects conducted by research organizations and universities monitoring
the Earth in scientific missions as well as spy satellites, scientific and
amateur satellites. The main
characteristics of the launch vehicle are given in Table 1. The launch vehicle Vega
[6] is the prototype of the vehicle under development.
The
planned payload to be delivered by the launch vehicle to a polar orbit at an
altitude of ~700 km shall be 1500 kg.
The launch vehicle is tailored for missions to low Earth and Sun-synchronous
orbits. During the first mission the light class launch vehicle is to launch
the main payload, a satellite weighing 400 kg, to an altitude of 1450 km with
an inclination of the orbit 71.500.
From the
standpoint of the problem concerned, namely the synthesis of the navigational algorithm of the space launcher in the proposed injection sequence we
are interested only in the first
factor, i.e. accuracy of lifting of the 3rd stage to the point of separation
4th stage. This
accuracy, other conditions being equal, is determined by the precision of solving a navigation task
in lifting the 3rd stage in
consideration of both components:
the center of mass and the velocity of the stage. They
predetermine the required impulse for the 4th stage
[7].
Thus, we may determine the main criterion of the accuracy of the navigation task in relation to the integrated inertial navigation system of the space launch vehicle: we need to ensure maximum accuracy in determining the position and velocity vectors of the 3rd stage of the launch vehicle in the exo-atmospheric phase
of the mission in the selected for
navigation coordinate system. Clearly, this accuracy, in its turn, other things being equal,
depends upon the accuracy of the initial conditions of travel of the 3rd stage,
or in other words, the accuracy of navigation on the previous atmospheric phase of the mission [1].
Consequently, in the case of the proposed injection sequence
the simplest and most obvious criterion for evaluation of the accuracy of
the synthesized system should be adopted.
It is required to ensure maximum accuracy in determining the vectors of position
and the center -of- mass velocity of the launcher during the flight of
the1st-3rd stages, i.e. in atmospheric and
exo-atmospheric phases of the mission. This
accuracy can be characterized by the
value of the dispersions posteriori
of the corresponding components of
the mentioned vectors [8].
Matherials and Methods. Now let's consider the possible integration schemes for GINS and GPS receiver with
respect to this technical problem
[9]. As it has been aforementioned, currently we can think
of three possible integration schemes as
follows [10-14]:
·
uncoupled (separated subsystems);
·
loosely coupled;
· tightly coupled (ultra-tightly coupled).
Uncoupled systems are the simplest option
for simultaneous use of INS and GPS receiver [15]. Both
systems operate independently. But,
as INS errors constantly
accumulate, it is necessary eventually to make correction of
INS according to data provided by the GPS
receiver. Creating such architecture
requires minimal changes to the hardware and the software [9].
In
loosely coupled systems GINS and GPS also generate separate solutions, but there
is a binding unit in which GPS-based measurements and GINS readouts make
assessment of the status vector and make corrections of data
provided by GINS [15].
The advantage of this
scheme is in high functional reliability
of the navigation system. The
drawback is in correlation of errors, arriving from
SGS to the input of the second Kalman filter and the need of strict synchronization
of measurements provided by INS and SGS [15].
In tightly coupled systems (Fig. 2) the role of the INS is reduced only to the measurement of the primary parameters of translational and
rotational motions. For this reason,
in such systems INS are only inertial
measurement units, and the GPS receiver is without own Kalman filter. In such a structure both INS and SGS
provide a series of measurements for a common computing unit
[15].

Fig. 2. Tightly coupled system using INS and GPS receiver
Tightly coupled systems are characterized by high accuracy
compared with aforementioned systems,
and the integrated filter makes it
possible to use all available GPS satellites
optimal way, but at cost of the
functional redundancy of the
system. Tightly coupled systems use the only "evaluator" (as a rule, the Kalman filter) that uses differences between
pseudoranges and/or pseudovelocities, calculated (predicted) by INS and measured
by Self-Guided System. Advantages of such a scheme are the following [6]:
· the
problem of measurement correlation is absent;
· there is
no need in synchronization of INS and Self-Guided System as just one clock generator is used;
· search and
selection of law quality measurements of pseudorenges.
The disadvantages of
closely coupled systems are the following [6]:
· the need
for special equipment for Self-Guided Systems;
· use of
complex equations for measurements;
· low
reliability because INS failure may result if failure of the whole system.
The later drawback can be eliminated by introducing a parallel Kalman filter only for Self-Guided
System [9].
Results and Discussion. The main factors that determine the structure and composition of the navigation
system are required accuracy
and reliability of navigation parameters
within the given limits on the weight, size, power consumption (in some cases - for the
time of the system development and operation security)
(Table 1). Besides, consideration should be given to:
·
types of objects;
·
cost of the complex;
·
service conditions;
· possibility of maintenance and repair.
Table 1
The main advantages of integrated systems
|
Factors |
Quality characteristic |
|
Accuracy |
substantially |
|
Weight |
decreasing by 30-70% |
|
Volume |
decreasing by 50-60% |
|
Power consumption |
decreasing by 25-50% |
|
Reliability |
increasing |
|
Redundancy level |
increasing by 50% and more |
|
Cost |
substantially |
Proceeding from the above information we may conclude that an integrated navigation system of future launchers should have a structure which, depending on the functionability of SGS receiver, shall allow operating in accordance with the algorithms both as an uncoupled and tightly coupled system. It should be
capable of processing coordinates
and velocities as well as pseudoranges and pseudovelocities.
The structure of the complex is to be open to information from other on-board navigation tools and external consumers of
navigation information. This may be done by introducing the corresponding
input/output ports.
With
regard to the above considerations, we propose the following structure of the integrated
complex:
· GINS – the
main system that provides self-sufficiency and reliability;
· GPS
receiver – a device correcting GINS
in latitude, longitude, altitude and velocity in three
velocity projection components;
· onboard
computer – carries out a full range of programs providing operation in various modes, in particular, it comprises a Kalman filter
algorithm.
Clearly, the first of the above schemes
using both GINS and
GPS receiver is not acceptable for our task, because here
the receiver is not used for calibration
(adjustment) of GINS during the mission by evaluating the drift component. As a result, in the absence of GPS-data errors of GINS grow at the same rate as in the absence of the receiver [6].
Next, each of the two following
schemes of interconnection (uncoupled and tightly coupled) have their advantages and
disadvantages with regard to the technical
problem in question. Indeed, by
using a loosely coupled scheme we
can implement evaluation
of GINS drift components and therefore in the absence of GPS-data, "departure" of GINS will be significantly compensated. Which means that the apriori rejection of a tightly coupled scheme as the most challenging to implement is not a sufficient reason. Indeed, if the flight conditions allow us to estimate the actual values of systematic errors in measurement
of and pseudorange and pseudovelocity,
the tightly coupled scheme allows us
obtain the highest possible accuracy of
navigation [6].
Thus, we conclude that in the present study it is appropriate to examine both schemes of
interconnection: tightly and loosely coupled, and based on the results of simulation, draw conclusions in favor of one of the possible solutions. Let us briefly examine the scientific and technical problems arising
when making the corresponding models and algorithms.
MM of spatial
motion of center of mass and relative to
center of mass of a solid launch vehicle
is well known and widely described in sources.
Mathematical
models of GINS are
currently also well described in sources, e.g. [17-21]. At the same time MM of GINS drift
depends essentially on the type of
gyro units and accelerometers
used in GINS. In other words, a so-called nonmodelable
constant is always present in the drift model. It ultimately
determines the possibility of GINS
alignment during flight. Because of apriori uncertainty of this component it is appropriate to select the parameters of the
shaping filter in such a way as to ensure the least impact on the accuracy of estimation. In other words, it is advisable in this case to receive a guaranteed result.
MM of
the navigation field created by the GPS and GLONASS systems, including the
visibility of individual satellites during the flight well characterized as
well and can be implemented as it is described in the source [15, 22].
Now we shall move on to the
analysis of the possible algorithms for processing navigation
information. Due to the specific nature of the set task that requires processing of navigational measurements
as soon as they are received, we will consider only the recursive modification of the following algorithms: Bayesian (and Kalman filter) or
recurrent modification of the least
square method, which do not require, as we know
an additional a priori information about
the state vector of the object. Thus,
measurements generated in GINS
enter with a relatively high
frequency (200 Hz) while the code
measurements from the receiver generally
enter with a frequency of 1 Hz
and the fact that GPS delay measurements may require special modifications of the recursive information algorithm.
Finally, essential is the choice of a model
predicting object's motion in the onboard algorithm. Moreover, generally there can be several different prediction models which will be used for different phases of flight: atmospheric and exoatmospheric.
Next, the different prediction models can be used when using loosely
coupled scheme of interconnection with the different rates of data entry from the GINS and
GPS receiver.
Finally, the
last aspect that we need to consider
in setting the technical problem in the present paper is
selecting an approach to the
shaping of an integrated navigation system for a space
launch vehicle with GPS technology. It is important to stress once again, as mentioned earlier, the term "shape"
will understand the structure,
composition, models and algorithms for integrated
navigation system [1].
Obviously that with regard to the variety of different physical nature of uncontrolled
factors having an effect within the framework of this problem, the nonlinear nature of MM of subject's motion and nonlinear relationship
between the results of measurements and
navigation components of the state vector, the only reasonable approach to solving the technical problems stated
above is the simulation
of the operation of the system to be shaped.
The above stated makes it necessary to create a special "tool"
that shall ensure the implementation of
the chosen approach to the solution of
the technical problem set. This tool is a computer system with a fairly simple interface
allowing, nevertheless varying interactively
source data and parameters of the models and algorithms for analyzing and modeling results presented
in graphic and numeric forms. Generally such a system must include two models: a model of
the environment and a model of a launcher board [6].
For its part, a model of the environment should include as much detailed model of the object, disturbances, and natural and artificial navigation fields.
Model of a Control System for the Launch Vehicle. A control
system of the launch vehicle is designed to maintain the required (programmed)
trajectory parameters of the center of mass
and around the center of mass (Fig. 3) [16]. The launch vehicle under consideration has
only a control system of angular motion,
as its flight is conducted under
a fixed program changing the pitch angle in time [24].
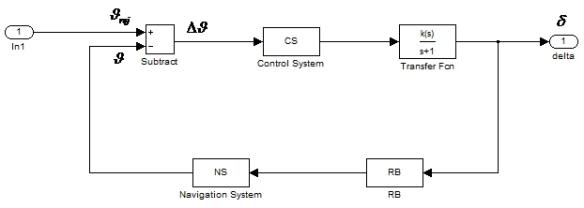
Fig. 3. Control system of the
launch vehicle: CS – Control System;
RB – Rocket Booster; NS – Navigation System
Thus, control system of the launch vehicle in this
case is designed for testing
programmed orientation angles of the launch vehicle and attenuation of disturbing environmental influences (wind, disturbing forces and moments in the separation of stages of the
launch vehicle, etc.) [1]. Control loop
implements program control, i.e. system tends to nullify the difference between the current (variable)
and programmed (set in time) orientation angles of the launch vehicle.
Thus, the launch vehicle flies in a
so-called "fixed" trajectory [24].
Obviously, the initial information for the control loop is based upon measured values of the
orientation angles of the launch vehicle and the absolute angular velocity component
of the launch vehicle in a body-fixed frame [25, 26].
Physically and
logically the control system of the launch vehicle
is divided into stages, since,
first, different stages use
different controls (control
thrusters and movable nozzles), and
second, weight and inertial characteristics
of the launch vehicle vary significantly in different
phases of its flight which requires to change the parameters of the control loop integrally.
Besides, the control
system is divided by channels (longitudinal and lateral motion) despite the fact that in the first stage control of both channels is performed by the same controls [1].
The parameters of control loop were
chosen based on the following conditions:
in the boost phase (BPH) generally and in all
modes stability of all closed
loops in the control system (CS) must
be ensured. Accordingly, the
author has made programs changing the coefficients which correspond to the controllers of the control system ![]() [27].
[27].
Accordingly, both loops close with
the help of special devices - distributor
and limiter of drive signals. Roll
control loop of the first stage
corresponds to the structure diagram
shown in Fig. 4.
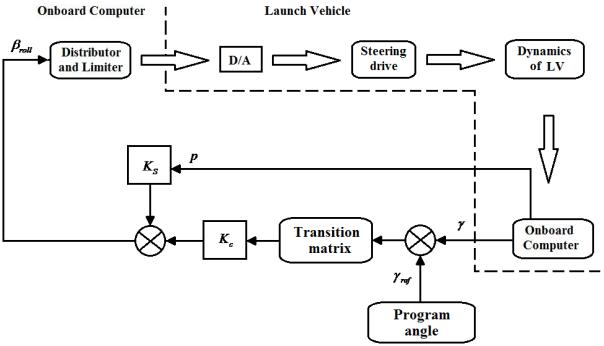
Fig. 4. Structure diagram of the roll control loop for the first stage of the launch vehicle
The master
controller equation shall be the following:
![]()
Since angular velocities of the launch vehicle are determined in a body-fixed frame and deflections of controls are determined in the same coordinate system, the difference between the angles of orientation of the launch vehicle must be reprojected using the transformation matrix in the following form:
Then, the controller
equation may be as follows [24]:
![]()
The structural
diagram of the limiter is given in Fig. 5.
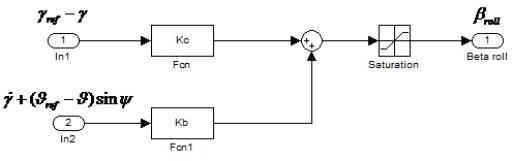
Fig. 5. Structural diagram of the limiter
A simplified
mathematical model of the
drive is shown in the structural
diagram (Fig. 6).

Fig. 6. Simplified
mathematical model of the drive
Here: ![]() is an input
signal;
is an input
signal; ![]() is nozzle
deflection;
is nozzle
deflection;
![]() is a feedback
coefficient;
is a feedback
coefficient;
![]() is the time
constant of the drive;
is the time
constant of the drive;
![]() are permissible values of the angular velocity and the angle.
are permissible values of the angular velocity and the angle.
Pitch and Yaw control
System of the First and Second Stages. The pitch control loop and yaw control
loop have the same controllers in the first
and second stages. At the beginning the boost phase commands from the controllers are sent to the drives of the first stage only, and then, during
the simultaneous operation of the
first and second stages for a few
seconds commands from controllers are
sent to the drives of the first and second stages simultaneously, and after separation of the boosters of the first
stage - only to
the drives of the second stage.
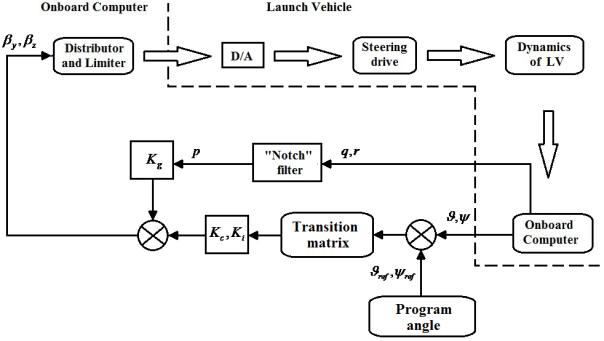
Fig. 7. Structural diagram of pitch and yaw control loop of the first stage of the
launch vehicle
The pitch and yaw
control loops of the first stage correspond to the structural diagram shown in
Fig. 7.
Generation of a control signal for the
distributor and the limiter in
the first stage is described above.
A distributor is
absent in the second stage, and a limiter is used to limit command
signals by the maximum specified value of the deflection angle
of the nozzle:
![]()
pitch signal: ![]() if
if ![]()
![]()
yaw signal: ![]() if
if ![]()
![]()
A simplified mathematical model of the drive is presented in the
structural diagram (Fig. 8).

Fig. 8. Simplified
mathematical model of the first stage drive
Here: ![]() is an input
signal;
is an input
signal; ![]() is control
deflection;
is control
deflection;
![]() is a feedback
coefficient;
is a feedback
coefficient;
![]() is the time
constant of the drive;
is the time
constant of the drive;
![]() are permissible values of the angular velocity and the angle.
are permissible values of the angular velocity and the angle.
Pitch and Yaw Control
System of the Third Stage. A limiter is used
to limit command signals by the maximum specified value of the deflection angle of the nozzle:
![]()
pitch signal: ![]() if
if ![]()
![]()
yaw signal: ![]() if
if ![]()
![]()
Roll Control System
of the 2nd and 3rd Stages. The main purpose of the
roll control loop on the second
and third stage is to stabilize
the roll movement of the launch vehicle and attenuate any
disturbances acting along the trajectory.
Unlike in the first two stages, stabilization is achieved by four specialized
liquid propellant engines installed diametrically in the third stage and
creating control moment pair wise, and not by deflection of nozzle of the solid propellant sustainer engine.
The roll control loop starts with
the moment of separation of the first
stage and runs until the moment of separation of the
third stage.
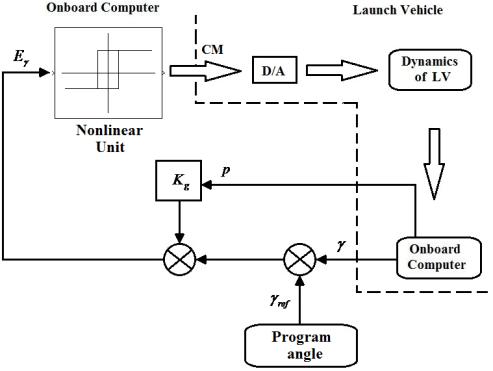
Fig. 9. Structural diagram of roll control loop of the 2nd and 3rd
stages of the launch vehicle
Block diagram of
the roll control loop for the 2nd and 3rd
stages of the launch vehicle is shown in
Fig. 9.
Conclusions
1. Based on the above, we have set a technical problem of the conceptual
design of an integrated navigation system for the space launch vehicle qualified to inject small artificial Earth satellites into low and medium circular orbits.
2. The conceptual design of the integrated navigation system based on GPS technology involves determination of its structure, models and algorithms, providing the required accuracy and
reliability in injecting payloads
with due regard to restrictions on weight and
dimensions of the system.
3. We have defined the sequence of essential
scientific and technical problems that lead to the solution of the major technical problem.
4. It has been demonstrated that it is appropriate to take a posteriori accuracy dispersion of the
position and velocity vectors of the
launch vehicle in phases of flight of I-III stages as a criterion of accuracy
of solving a navigation task.
5. We have made an analysis of possible models of flight and navigation measurements and identified
key potential difficulties in the process of their creation.
6. We have shown that the
main approach to solving the
technical problem is simulation
modeling with application of object-oriented soft.
References
1. Zosimovych
Nickolay. Integrated Navigation System for Prompting of the Commersial Carrier
Rocket. Information technology Conference for Academia and Professionals
(ITC-AP 2013), Sharda University, India, 19-21 April, 2013.
2. Flight instruments and navigation systems.
Politecnico di Milano - Dipartimento di Ingegneria Aerospaziale, Aircraft
systems (lecture notes), version 2004.
3. George M. Siouris. Aerospace Avionics Systems. Academic Press, INC
1993.
4. Kyu Sung Choi. Development of the commercial
launcher integrated navigation system the mathematical model, using GPS/GLONASS
technique. 52nd International Astronautical Congress, France,
Toulouse, 2001.
5. http://ru.wikipedia.org/wiki/ - Вега
(ракета-носитель).
6. Nickolay Zosimovych, Anatoly Voytsytskyy. Disturbed Motion of the Launch
Vehicle with Integrated GPS/INS Navigation Systems. "Бъдещите изследвания – 2014" Proc. X
International Scientific and Practical Conference, Sofia, 17-25 February, Vol. 49. Technologies.
Physics, Sofia: Бял ГРАД-БГ, 2014, PP. 3-9.
7. Лебедев А.А., Аджимамудов Г.Г., Баранов В.Н.,
Бобронников В.Т. и др. Основы синтеза систем летательных аппаратов. М.: МАИ,
1996, 224 c.
8. Bayley D.J. Design Optimization of Space Launch Vehicles Using a genetic
Algorithm, Auburn University, Alabama, 196 pp., 2007.
9. Zosimovych Nickolay. Selecting Design Objectives for an Integrated
Guidance System of a Commercial Launch Vehicle with Application of GPS
Technologies. The Open Aerospace Engineering Journal, 2013, Vol. 6, PP.
6-19.
10. Scherzinger, B. Precise Robust
Positioning with Inertial/GPS RTK Proceedings of ION-GPS-2000,
Salt Lake City UH, September 20-23, 2000.
11. Urmson, C., et al, A
Robust Approach to High Speed Navigation for Unrehearsed Desert Terrain,
Pittsburgh, PA, 2006.
12. Ds. Whittaker, W, Nastro, L., Utilization of Position and Orientation Data
for Preplanning and Real Time Autonomous Vehicle Navigation, GPS World,
Sept 1, 2006.
13. Daniel J. Biezad Integrated Navigation and Guidance Systems. AIAA
Education Series, 1999.
14. John F. Hanaway, Robert W. Moorehead. Space shuttle avionics system,
505 pp., 1989.
15. Управление и наведение беспилотных
маневренных летательных аппаратов на основе современных информационных
технологий / Под ред. М.Н. Красильщикова и Г.Г. Себрякова. – М.: ФИЗМАТЛИТ,
2003, 280 с.
16. Nickolay Zosimovych, Anatoly Voytsytskyy. Design objectives for a
commercial launch vehicle with integrated guidance system. Novus
International Journal of Engineering&Technology, Vol. 3, No 4, 2014,
PP.7-28.
17. Boulade S., Frapard B., Biard A. GPS/INS Navigation system for
launchers and re-entry vehicles-development and adaptation to Ariane 5. ESA
GNC, 2003, pp. 57-64.
18. Kelly A.J. A 3D State Space Formulation of a Navigation Kalman Filter
for Autonomous Vehicles. CMU Robotics Institute Technical Report
CMU-RI-TR-94-19.
19. Alonzo Kelly. Modern Inertial and Satellite Navigation Systems. The
Robotics Institute Carnegie Mellon University, CMU-RI-TR-94-15, 1994.
20. Milan Horemuž. Integrated Navigation. Royal Institute of
Technology, Stocholm, 2006.
21. Cox, D. B. Jr. Integration of GPS with Inertial Navigation Systems.
Institute of Navigation, pp. 144-153.
22. http://satellite-monitoring.at-communication.com/en/secure/seu8800.pdf -
Satellite Monitoring and Intercept System SEU 8800.
23. Федосов Е.А., Бобронников в.Т.,
Красильщиков М.Н., Кухтенко В.И. и др. Динамическое проектирование систем
управления автоматических маневренных летательных аппаратов. М.:
Машиностроение, 1977, 336 с.
24. Veniamin V.
Malyshev, Michail N.
Krasilshikov, Vladimir T.
Bobronnikov, Victor D.
Dishel. Aerospace vehicle control, Moscow, 1996.
25. Zelenkov A.A., Sineglazov V.M., Sochenko P.S. Analysis and synthesis
of the discrete-time systems. Kyiv: NAU, 2004, 168 p.
26. Jiann-Woei Jang, Abran Alaniz, Robert Hall, Nazareth Bedrossian,
Charles Hall, Mark Jackson. Design of Launch Vehicle Flight Control Systems
Using Ascent Vehicle Stability Analysis Tool. AIAA Guidance, Navigation, and
Control Conference, 08-11 August 2011, Portland, Oregon, USA. AIAA
2011-6652.
27. Основы
проектирования летательных аппаратов (транспортные системы). Учебник для
технических вузов / В.П. Мишин, В.К. Безвербый, Б.М. Панкратов и др. Под ред.
В.П. Мишина. – М.: Машиностроение, 1985. – 360 с.