Бекмамбет К.М., к.т.н.,
доцент
Кажыгулов А.К., д.т.н.,
и.о.профессора
Кайнарбеков А.К., д.т.н.,
профессор
(г Алматы, Республика Казахстан)
НОВАЯ КОНСТРУКТИВНАЯ СХЕМА
КОЛЕСНО-ШАГАЮЩЕГО ДВИЖИТЕЛЯ
Проще всего модернизировать
обычные детские коляски так, чтобы они ездили не только по ровной поверхности
дороги, а еще могли передвигаться вверх и вниз по лестнице. Для этого
достаточно для двух пар колес установить свою полураму, а затем их соединить
шарнирно, как показано на (рисунок 1).
При этом, нужно
согласовывать размеры лестницы с размерами коляски (рис 1а). Взаимно
оказывающие возмущения определяют легкость и точность процесса перешагивания по
лестнице. В результате получается схема механизма колесно-шагающего движителя
переменной структуры.
В положении схемы механизма
как показано на рисунке 2в коляска состоит из двух полурам 1и 2, связанны между
собой в точке А шарнирно с ограничителем Т. Поэтому при вращении полурамы 1 по
ходу часовой стрелки обе полурамы как одно звено вращаются вместе и вращаются
относительно точки О2 центра первого колеса К1. При этом
схема механизма состоит из одного звена О1АО2 и одного
шарнира с одной подвижностью. Поэтому степень подвижности механизма равна:
n =
1, p =
1, и W =
При вращении рычага О1А
вниз с помощью момента руки водителя М, колесо К из первоначального положения 1о
перейдет во второе положение 2о и механизм займет второе
положение  A1O2.
A1O2.
Если по направлению силы Р
рычаг  А толкнуть в перед, то схема механизма
перейдет в третье положение
А толкнуть в перед, то схема механизма
перейдет в третье положение  А2 О2. При этом колесо
К1 упрется к полку лестницы и остановится.
А2 О2. При этом колесо
К1 упрется к полку лестницы и остановится.
В этом положении механизм
также обладает одной степенью подвижности т.е:
n =
3, P1 =
4, и W =
Дальнейшее действие силы P
приводит к перемещению колеса К по верхней полке лестницы и растягивает пружину
П (рис. 2с), связывающую поперечных осей пары колес. Упертое колесо К1
под действием заряженный пружины поднимается и займет полку лестницы, которую
ранее занимал (в исходном положении схемы механизма) первая пара колес К. Так
происходит последующие взаимодействия привода с элементами лестницы и
перешагивание колесами полок лестницы.
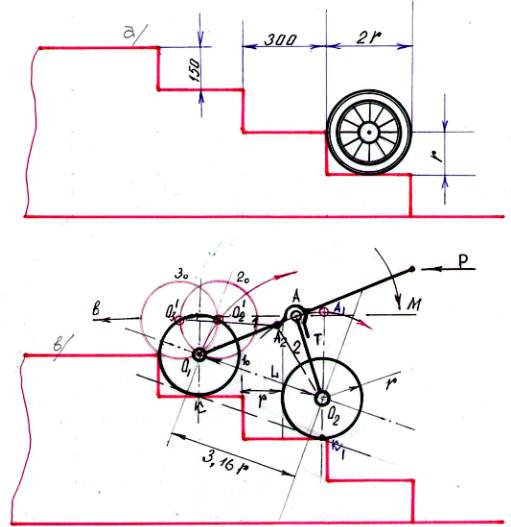
Рисунок
1. К определению взаимосвязи геометрических размеров лестницы и коляски
Для нормальной работы
механизма коляски при движении по лестнице нужно определить длины рычагов
полурам и размеры колес и силы пружины в зависимости от веса G.
Приведем методику расчета
основных параметров коляски (рисунок 2).
На (рис 1а и рис 1в) были
показаны исходные размеры некоторых элементов коляски. Прежде всего это радиусы
всех колес одинаковые и равные высоте полки лестницы, т.е:
![]()
а диаметры колес: ![]() т.е. равные к длине полки лестницы.
т.е. равные к длине полки лестницы.
Некоторые отклонения
размеров лестницы на работу коляски особо не влияют. Увеличение или уменьшение
груза, погруженного на коляску, также особого значения не имеет, т.к. подвижность
двух полурам относительно друг друга, ограничивается специальными
ограничителями Т. Максимальное межосевое расстояние центров поперечных осей
пары колес равно L и устанавливается ограничителем Т.
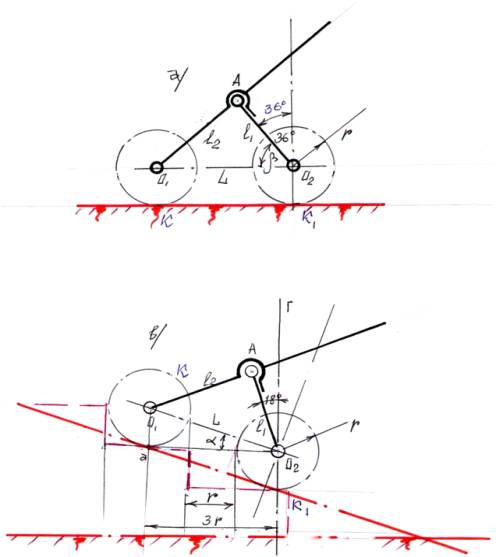
Рисунок 2. К расчету определения
параметров
Для
определения длины полурам , а также максимальной длины L
поступаем следующим образом (рис. 3в).
Из определим L
так:
![]()
а
длиной полурамы ![]() задаемся как:
задаемся как:
![]()
Положение
L при подъеме по лестнице определяется
углом ![]() , который определяется так:
, который определяется так:
![]()
В
переводе в градусы: ![]() .
.
Для
подъема первой пары колес на высоту следующей полки лестницы надо еще раз
поднять L на 18![]() . В результате положение
. В результате положение ![]() совпадает с направлением гравитационной линии Г Г и образует с ней
угол
совпадает с направлением гравитационной линии Г Г и образует с ней
угол ![]() (рис. 3а). В этом положении определим угол
(рис. 3а). В этом положении определим угол ![]() так:
так:
![]()
из
АО2 (рис. 3а) определим длину полурамы ![]() так:
так:
![]()
Или ![]()
ЛИТЕРАТУРА
1. А.Кайнарбеков,
А.Омаров, А.Муратов А. Хикаят шагающего колеса. «LAP» LAMBERT Academic
Publishing, ,Saarbrücken, Germany, 2014,
270 s.
2. Муратов А.М., Кайнарбеков А.К. и др. Шагающие движители: Учебное пособие.
«Бастау», г Алматы, 2000. 182с.
3. Бескин
И.А. Транспорт для бездорожья – Москва: Знание, 1971г.
4. Муратов А.М., Кайнарбеков А.К. и др. Гусенично - шагающий движитель транспортного
средства: Патент РК № 11006, Алматы, 14.11.2001, бюл. №12.