К.т.н.
Бойко С.Н., Михайличенко Д.А., Блинова А.С., студентка
Кременчугский
национальный университет им. М. Остроградского
ИССЛЕДОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ ПРИ ПУСКЕ
СИНХРОННОГО ДВИГАТЕЛЯ С ШИРОТНО-ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ
Введение. Пуск мощных синхронных электрических двигателей
имеющих большие моменты инерции и предназначенных для функционирования в
комплексе современных электромеханических систем, как
правило, производится при помощи пусковых устройств, в т.ч. на основе полупроводниковых преобразователей
электрической энергии [1, 2]. При этом алгоритмы формирования требуемых выходных
электрических параметров таких пусковых устройств могут быть различными и варьироваться в силу требований технологи
функционирования конкретного механизма [3, 4].
Оценка и выбор наиболее подходящего способа
формирования выходных форм кривых тока и напряжения широтно-импульсного
преобразователя (ШИП) при широтно-импульсной модуляции (ШИМ), для конкретной
электротехнической системы, задача не однозначная, ввиду существования нескольких вариантов управления
преобразователем. Поэтому актуальным является решение вопросов связанных с
моделированием пуска синхронного электрического двигателя (СЭД) с ШИП частоты при различных законах формирования выходных
параметров преобразователя [5,6].
Цель
работы. Целью работы является анализ переходных процессов
при пуске СЭД с использованием ШИП с синусоидальным, трапецеидальным и
прямоугольным выходным напряжением на базе математической модели построенной в
координатах ток статора и потокосцепление статора.
Материалы
исследований. Наиболее часто
переходные процессы в электромеханических системах с СД рассматриваются в координатных осях d, q.
Однако особенностью применения
преобразований в координатных осях d, q является
положение о чисто синусоидальном фазном напряжении на статорных обмотках СД. И
использование формирователей реального напряжения на его обмотках при
использовании ШИП в режиме реального времени может привести к неоправданным
погрешностям при моделировании. Для
исследования использована математическая модель СЭД в основу построения которой
положена обобщенная система дифференциальных уравнений СЭД Парка – Горева в
векторной форме записи [7]. Для реализации
ШИМ управления ШИП использован алгоритм формирования пространственного вектора
напряжения. При моделировании приняты параметры серийного СЭД ДС260/44-36УХЛ4.
Решение поставленной задачи проводилось в программной среде Фортран.
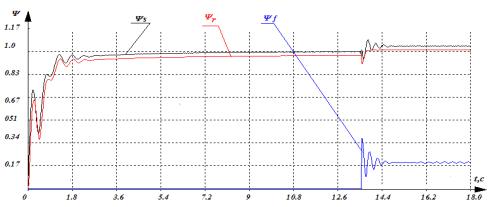
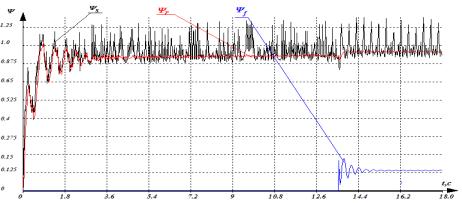
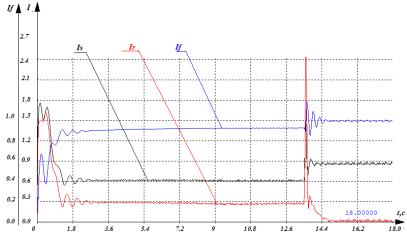
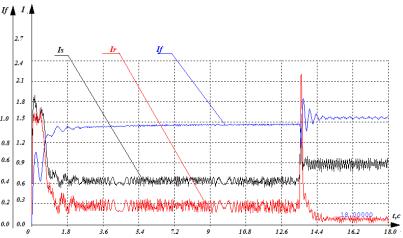
Результаты моделирования пуска СЭД при синусоидальном, трапецеидальном и прямоугольном напряжении питания приведены на рис.1 - рис.3 соответственно.
Среднее значение пускового момента
(рис.1а) составляет 0,9-1,2
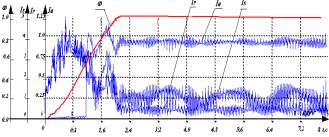
номинального. При этом время разгона составляет 3,2c. Токи синхронного двигателя, пульсирующие с
модуляцией низкой частоты (рис.1б) с амплитудой 0,4-0,5 номинального тока,
обуславливают пульсации момента величиной 0,3-0,4 номинального. Среднее
значение пускового момента составляет
1,8 номинального, а время пуска приблизительно 2c (рис.2а).
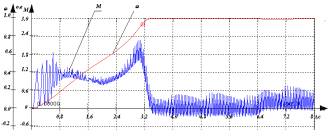
а)

б)
Рисунок 1 – Переходный
процесс по скорости – ω и
моменту – M при синусоидальном напряжении а); переходный процесс
по скорости – ω, току статора – Is, пусковой
обмотки – Ir и току возбуждения – Iв при синусоидальном напряжении б)



 ,
,