Чорновол Д.І, студент;
Пуховський Є.С., д.т.н., професор
НТУУ «Київський політехнічний інститут», м. Київ, Україна
МОДЕЛЮВАННЯ
ГНУЧКИХ ВИРОБНИЧИХ СИСТЕМ МЕХАНООБРОБКИ
В статті розглянуті основні принципи та групи моделювання гнучких
виробничих систем, наведено один із методів її реалізації, розглянутий приклад
моделі ділянки в механообробці і
зроблено висновок щодо більш ефективного способу використання данного методу.
Моделювання - це процес створення моделі,
що є, залежно від вирішуваних завдань, точною або наближеною копією об'єкту
моделювання з подальшим пізнанням на основі моделі образу поведінки
модельованого об'єкту.
Будь-яка гнучка виробнича система (ГВС)
орієнтована на ефективне функціонування. Ефект від даного функціонування може
бути різний (економічний, соціальний і тому подібне). В більшості випадків
показники ГВС орієнтовані на економічні показники, надійність яких є життєво
важливою для підприємства, і це необхідно враховувати при процесах моделювання.
Стосовно гнучких виробничих систем процес моделювання можна розглянути з двох
стадій життя ГВС (гнучких виробничих систем):
·
Моделювання роботи ще не створеної ГВС.
·
Моделювання роботи вже створеної ГВС.
У першому випадки вирішуються загальні
завдання, такі як вибір найкращого розташування устаткування, вибір самого
устаткування і його технічних характеристик для його синхронної роботи, і
розклад робіт устаткування. Для цього вибирається багаточисельний набір
економічних і загальнотехнічних показників. На даному етапі
моделювання не доцільно використовувати (моделювати) точніші технічні
показники, оскільки це достатньо трудомісткий процес і кореляція цих показників
з фактичними була б дуже мала.
Другий випадок, коли в нашому
розпорядженні вже є ГВС, то існує необхідність моделювання її роботи
максимально наближеною до об'єкту моделювання. У даному процесі розраховуються
вужчі технічні показники, оскільки розробник володіє все інформацією про
устаткування і про технологічний маршрут установки деталей.
Як відомо, методи вирішення завдань прогнозування поводження гнучкої
виробничої системи в часі характеризуються різною достовірністю, і отже, і
різною точністю отримуваних рішень. Розрізняють чотири групи методів
моделювання гнучких виробничих систем з врахуванням надійності їх
функціонування: аналітичне,
імітаційне , аналітико-імітаційне, нейромережеве. Результатом рішення задачі
моделювання є тимчасове і просторове налагодження функціонування технологічного
устаткування.
Міра складності моделей залежить від рівня
логічної деталізації виробничого процесу, що приймається. Це питання є головним
при визначенні вигляду моделі, що розробляється, і рішення, що приймається, з
даного питання визначає точність результатів моделювання.
Імітаційне
моделювання - це метод, що дозволяє будувати
моделі, що описують процеси так, як вони проходили б насправді.
Основними вимогами до імітаційних моделей
ГВС є адекватність моделі, максимальна наближеність алгоритмів до методології
об'єктного програмування і універсальність, як можливість представлення всієї
безлічі дискретних станів системи. Не дивлячись на те, що дані моделі з
обчислювальної точки зору декілька простіше, ніж аналітичні, з їх допомогою
важко або неможливе отримати оптимальне рішення.
Імітаційне моделювання використовується у
випадках:
· неможливості побудови аналітичної моделі (коли в системі присутні час,
причинні зв'язки, наслідок, нелінійності, стохастичні (випадкові) змінні);
· неможливості і дорожнечі експериментів в реальності; необхідності імітації
поведінки системи в часі.
При розробці імітаційної моделі
виявляються найбільш істотні зв'язки між елементами, модельованого предмету, що
надалі дає можливість симулювати реальний об'єкт в середовищі моделювання з
метою проведення різних експериментів. Явною позитивною рисою, є те, що часом в
моделі можна управляти, тобто уповільнювати у випадку з процесами, що швидко
протікають і прискорювати для моделювання систем з повільною мінливістю.
Існує три основні підходи в
імітаційному моделюванні:
·
Дискретно - подієве моделювання.
·
Системна динаміка.
·
Агенте моделювання.
При створенні
імітаційних моделей найбільш суттєвою і складною є побудова концептуальної
моделі ГВС (логічної схеми її функціонування) і алгоритмізація функціонування
її елементів (формалізація опису). Ці моменти і визначають якість моделі.
Як приклад може бути розглянута імітаційна
модель ділянки ГВС механообробки. Ділянка (рис.1) включає гнучкі виробничі
модулі (ГВМ) 1 з приверстатними накопичувачами заділів (ВН) 2, трансманіпулятор
(ТМ) 3 і центральний склад (ЦС) 4. ТМ здійснює переміщення заготовок і
оброблених деталей між ЦС і ГВМ. В разі зайнятості ВН в ГВМ наступного по
маршруту обробки, деталі транспортуються на ЦС.
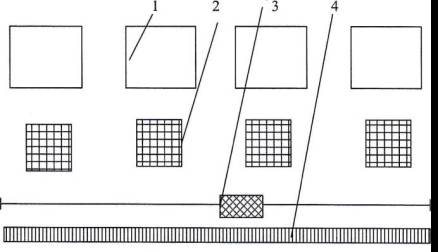
Рисунок 1 – Прилад
ділянки ГВС механообробки
Робота ділянки
характеризується номенклатурою деталей, планово- технологічними даними по
закріпленню деталеоперацій за ГВМ,
верстатоємностями операцій, параметрами надійності роботи устаткування, даними
автоматизованої транспортно-складської системи (АТСС) - швидкістю і законами
транспортування, часом завантаження - вивантаження, ємністю ЦС і кожного ВН, їх
розташуванням відносно ГВМ і ін.
Отже
важливою характеристикою систем моделювання ГВС механообробки є спосіб
організації процесу моделювання в часі. Існує два таких способи — з фіксованим
за часом кроком та від події до події. Виробничі системи механообробки
відносяться до класу дискретних, тому для них більш ефективне моделювання за
подіями, оскільки воно дозволяє економно використовувати машинний час, особливо
у випадках, коли проміжки часу між подіями нерівномірні та великі.
Література:
1.
Є.С.Пуховський. Проектування та експлуатація
гнучких виробничих сестем металообробки - Київ, НМК ВО, 1992р. - 156с.
2. http://vsau.vin.ua/repository/getfile/2394.pdf .