Кайнарбеков А.К., Муратов А., Бекмамбет К.
СИНТЕЗ
СХЕМЫ ШАГАЮЩЕГО КОЛЕСА ИНВАЛИДНОЙ КОЛЯСКИ
Прежде чем определять
размеры шагающего колеса, необходимо их сопоставить с размерами полок лесничими
маршами (рис. 1).
Если расстояние от одной
кромки 1 горизонтальной полки лестницы до другой кромки 2 равна Т, высота полки
равна Н, то искомый шаг шагающего колеса равен:
![]()
где: ![]()
Если по условию
проектирования задается число ног шагающего колеса равным восьми, то угол между
спицами равномерно расположенными вокруг центра ступицы О равен 45о,
т.е:
![]()
Две опорные спицы
расположим к полкам лестничного марша (рис. 1а) в точках “а” и “в”,
расположенных на одинаковом расстоянии от кромки полок и в точке “в” проведем
вертикальную линию, перпендикулярную к полке лестницы “е в”, а из точки “а”
проведем линию под углом 45о к вертикальной линии. В пересечении
этих линии находим центр ступицы О проектируемого шагающего колеса. Тогда,
длина шага t
шагающего колеса будет равной диагонали полок
лестницы т.е:
˘ (мм)
(мм)
А радиус шагающего колеса равен:
![]() (мм)
(мм)
Какую часть обода убрать, а
какую часть оставить зависит от назначения шагающего колеса. На рис. 1в
показана схема восьминожного шагающего колеса, состоящего из корпуса ступицы 1,
восьми спиц 2, жестко закрепленных к корпусу ступицы, и упругих элементов 3,
закрепленных к спицам.
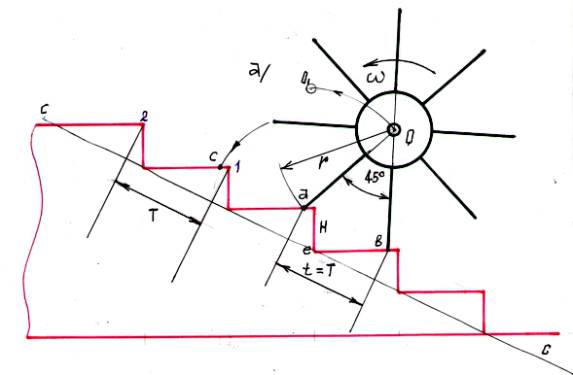
Рисунок
1. Взаимосвязь размеров колеса и лестничного марша
Шагающее колесо снабжено ступней “ab”.
Это есть оставленная часть обода, а участок “в1 a2”
- убранная часть обода. Полный шаг шагающего колеса t
состоит из двух участков. Участок a2b2 называется шаг tкр
колесного режима движения, а участок в1 a2 –
шаг tшр шагового
режима движения, т.е. полной шаг колеса равен:
T=tкр+tшр
По длине tкр и tшр могут быть не одинаковыми или могут быть
одинаковой длины. Если увеличивать tкр и
уменьшать tшр ,
то шагающее колесо вырождается в колесо с круглым ободом. При этом проходимость
колеса по бездорожью уменьшается, а комфортность езды увеличивается. Наоборот,
если увеличивать tшр, и уменьшать длину tкр,
то колесо вырождается в шагающее колесо (рис.9а). При этом проходимость
повышается, а комфортность снижается. На этой основе производится синтез схемы
шагающего колеса.
Таким образом, синтез схемы
шагающего колеса состоит из двух этапов. На первом этапе определяются некоторые
размеры элементов шагающего колеса, исходя из условия взаимодействия колеса с
лестницей. Как было видно выше, исходя из взаимодействия колеса с элементами
лестницы, были определены длина радиуса шагающего колеса, длина шага t и
высота препятствия Н.
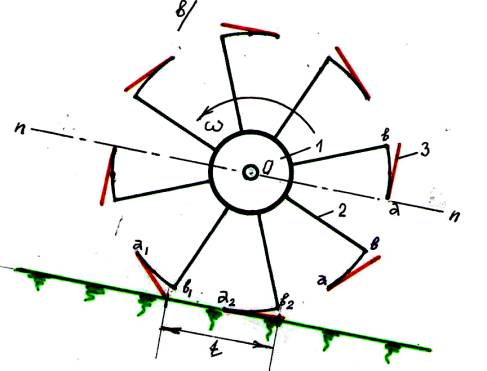
На втором этапе синтеза
определяются длина ступни a1b1=a2b1 спицы
и длина дефекта походки ∆ (рис. 2)
Рисунок
2. К синтезу схемы шагающего колеса
Выбираем положение центра
ступицы О. Через этот центр проводим лучи 1,2,3,...,8, образующие между собой
угол 45º. Относительно центра О проводим окружность ОК1 с
проектным радиусом ρ. Примем за опорные точки двух ног точки 1 и 8 и в
пересечении луча 01 и 08 с окружностью ОК1. Через эти точки проводим
линию ХХ поверхности опоры. Поставим условие, что tкр=tшр.
Тогда придется отрезок 18 разделить на четыре равные части на а1=а1к=кв2=в28
тогда:
tшр =
а1 в2
tкр =
в1 а1= в2 а2
Через точки а1 и
в2 проводим окружность ОК2 относительно центра О. Длину
шага tшр =
а1 в2 отложим относительно точки а, вдоль дуги окружности
ОК2 влево получим точку в1. Длина в1 а1
является длиной ступни. Отложив эту длину ступни вдоль дуги ОК2 относительно
всех спиц 1,2,3,...,8, получим схему шагающего колеса. Впредь это полученное
колесо назовем восьми ножным шагающим колесом. Часть дуги а1в1 =
а2в2 = …а8в8 назовем ступнями. У
этого колеса есть три особых положения, из которых можно отметить три его
особенности по сравнению с обычным пневмоколесом с круглым ободом.
На рисунке 3 показаны эти
три положения. Для определения различных положений шагающего колеса, стоящего
на опорной плоскости, удобно поворачивать опорную плоскость относительно
шагающего колеса, для того чтобы каждый раз не рисовать сложные фигуры колеса.
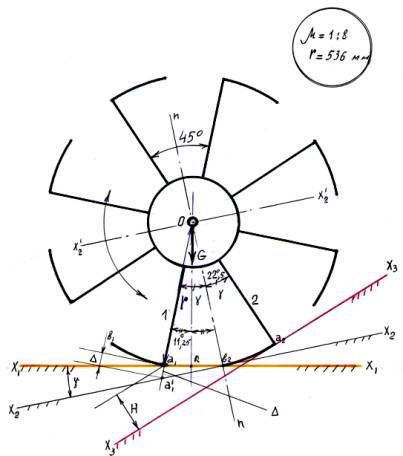
Рисунок
3. К синтезу схемы шагающего колеса
Первое особое положение
колеса показано на плоскости ХIXI
черной толстой линией. Это положение назовем устойчивым положением шагающего
колеса.
В этом положении колесо
опирается на две точки плоскости опоры ХIXI, т.е.
упирается пяткой «а» одной ноги и носком другой ноги «в2». В этом
положении сила веса G равномерно распределяется по опорным точкам. А также в
этом положении центр ступицы О опускается ниже уровня своей прямолинейной
траектории, т.к. высота ОК треугольника а1 ов2 меньше
длины радиуса колеса r.
Второе особое положение
колеса определяется тогда, когда носок в2 второй ноги 2 оказывается
на направлении вертикальной линии «nn», перпендикулярной
плоскости Х2X2, образующей
с плоскостью ХIXI угол ![]() =1100.В
этом положении колесо оказывается в неустойчивом положении, т.е. опирается на
одну точку в2 опорной плоскости, первая нога отрывается от опоры на
расстояние аI
=1100.В
этом положении колесо оказывается в неустойчивом положении, т.е. опирается на
одну точку в2 опорной плоскости, первая нога отрывается от опоры на
расстояние аI .
.
При перекатывании колеса по
опорной поверхности Х2X2,
оно падает на величину аI , вращаясь
относительно точки опоры в2 и центр ступицы О опускается ниже своей
траектории. Это падение центра ступицы создает дефект походки колеса по
сравнению с перекатыванием круглого колеса.
, вращаясь
относительно точки опоры в2 и центр ступицы О опускается ниже своей
траектории. Это падение центра ступицы создает дефект походки колеса по
сравнению с перекатыванием круглого колеса.
Для устранения этого
дефекта, к пяткам шагающих ног устанавливается упругий каблук. Величина упругой
деформации каблука равна длине падения пятки ![]() = аI
= аI до опорной поверхности дороги.
до опорной поверхности дороги.
Деформацию упругого
элемента каблука обозначим через
где,  элемента изменяющаяся в зависимости от угла
поворота
элемента изменяющаяся в зависимости от угла
поворота ![]() т.е. есть функция
т.е. есть функция ![]() ,
, ![]() аI
аI – максимальная
высота падения пятки наступающей ноги колеса.
– максимальная
высота падения пятки наступающей ноги колеса.
Высота падения пятки определяется из:
![]() = О
= О - r =
- r = ![]() - r;
- r;
из ![]() Ов2
Ов2 :
:

или

 =0,42r.
=0,42r.
Из: 
тогда: ![]() (максимальное значение).
(максимальное значение).
Иначе можно представить
высоту падения пятки колеса при движении по ровной поверхности как:
![]() (мм),
(мм),
т.е . - часть радиуса колеса.
Это незначительная высота
падения при движении колеса по бездорожью, при движении на больших скоростях
практически не будет заметна в экипажной части. А при движении колеса по ровной
и с твердой поверхности дороги будет создавать вибрацию экипажной части.
Третье особое положение
шагающего колеса применяется для определения высоты минимальной проходимости
колеса Н. Этот параметр колеса гарантирует безударную встречу ступни колеса с
препятствием минимальной высоты. В данном случае высота Н должна быть больше,
чем высота полок лестницы. Стандартная высота полок лестницы равна 150 мм. Это
высота определяется исходя из условия, когда задняя нога находится в опоре,
т.е. когда направление спицы перпендикулярно к опорной поверхности Х3
Х3, а передняя нога своей пяткой должна находится на высоте Н от
поверхности дороги.
На рисунке 3 эта высота
найдена путем поворота опорной поверхности дороги Х3 Х3 до
перпендикулярного положения к направлению спицы 2.
ЛИТЕРАТУРА
1. Муратов А.М., Кайнарбеков А.К. и др. Шагающие движители: Учебное пособие.
«Бастау», г Алматы, 2000. 182с.
2. А.Кайнарбеков,
А.Омаров, А.Муратов А. Хикаят шагающего колеса. «LAP» LAMBERT Academic
Publishing, ,Saarbrücken, Germany, 2014.
3. Омаров
А.Д., Муратов А., Кайнарбеков А., Бекмамбет К.М. «Бездорожное транспортное
средства»: г. Алматы, 2015г. 182стр.