Технічні
науки/12. Автоматизовані системи керування на виробництві
Мовчан А.П., Матковський П.Ю.
Національний технічний університет
України «КПІ», Україна
Параметрична
оптимізація каскадної системи з коригуючим регулятором зі змінною структурою
Багато промислових об’єктів при автоматичному регулюванні потребують аперіодичних
перехідних процесів. Це стосується автоматичного регулювання, наприклад,
температури перегрітої пари у потужних котлоагрегатах, системи регулювання
температури газового середовища котлоагрегатів, системи регулювання рівня у
барабані барабанних котлів тощо. Вони реалізуються з введенням похідної з
проміжної точки, або ж каскадними.
Виникає необхідність розробки методу побудови каскадної системи
автоматичного регулювання (САР), перехідні процеси в якій будуть аперіодичними.
Для побудови такої системи в якості головного (коригуючого) регулятора
запропоновано використати малочутливий до зміни параметрів об’єкту керування
алгоритм зі змінною структурою [1, 2]. В якості допоміжного (стабілізуючого) регулятора може
бути використано пропорційний або пропорційно-інтегруючий. Структурна схема
каскадної САР має вигляд:
Рисунок 1. Схема каскадної
системи автоматичного регулювання.
На рисунку
прийняті позначення: ![]() – сигнал завдання;
– сигнал завдання; ![]() ,
, ![]() – сигнали розбалансу;
– сигнали розбалансу; ![]() ,
, ![]() – виходи регуляторів;
– виходи регуляторів; ![]() – керуюча дія, що подається
на об’єкт керування;
– керуюча дія, що подається
на об’єкт керування; ![]() – сигнал з проміжної
точки;
– сигнал з проміжної
точки; ![]() – вихід системи.
– вихід системи.
Оскільки в якості коригуючого регулятора каскадної
САР обрано нестандартний регулятор, застосування існуючих методик настроювання
системи неможливе. Для побудови системи автоматизації настроювання запропоновано
використати метод оптимального параметричного синтезу.
Постановка задачі оптимізації:
Рівняння
швидкодіючої та інерційної ланок об’єкта відповідно:
![]() (1)
(1)
де ![]() – коефіцієнти передачі;
– коефіцієнти передачі; ![]() – сталі часу;
– сталі часу; ![]() – транспортні запізнення,
– транспортні запізнення, ![]() .
.
Рівняння коригуючого
регулятора має вигляд [2]:
 , (2)
, (2)
 (3)
(3)
де ![]() – коефіцієнт передачі коригуючого
регулятора;
– коефіцієнт передачі коригуючого
регулятора; ![]() – момент включення коригуючого
регулятора;
– момент включення коригуючого
регулятора; ![]() – мінімальне
транспортне запізнення інерційної ланки об’єкта,
– мінімальне
транспортне запізнення інерційної ланки об’єкта, ![]() – час, протягом якого
діє ненульова структура (3);
– час, протягом якого
діє ненульова структура (3);
![]() – моменти
часу, коли починає виконуватись умова:
– моменти
часу, коли починає виконуватись умова:
![]() , (4)
, (4)
де ![]() – оцінка
похідної
– оцінка
похідної ![]() :
:
![]() . (5)
. (5)
Стабілізуючий регулятор:
![]() , (6)
, (6)
де ![]() – коефіцієнт підсилення
стабілізуючого регулятора.
– коефіцієнт підсилення
стабілізуючого регулятора.
Обмеження по перерегулюванню:
![]() , (7)
, (7)
де ![]() –
перерегулювання,
–
перерегулювання, ![]() –
максимально допустиме перерегулювання.
–
максимально допустиме перерегулювання.
Критерій
оптимізації:
![]() , (8)
, (8)
де ![]() – час завершення
перехідних процесів в системі.
– час завершення
перехідних процесів в системі.
Критерій оптимізації не є екстремальною функцією, тому задача оптимізації є
задачею нелінійного програмування з обмеженнями типу нерівності, для
розв’язання якої використаний одномірний пошук з перевіркою виконання обмежень.
Пошук повинен
бути завершений при виконанні наступних умов:
![]() , (9)
, (9)
де ![]() ,
, ![]() – малі наперед
задані величини.
– малі наперед
задані величини.
В якості органу оптимальної
настройки системи можна використовувати коефіцієнт передачі регулятора змінної
структури ![]() [1, 2], проте
експерименти показують, що можлива аналогічна оптимізація також по
[1, 2], проте
експерименти показують, що можлива аналогічна оптимізація також по ![]() . Параметри області (4) не змінюються, а параметр
демпфера (5) прийнятий чотирьом інтервалам квантування системи (для реальних
систем регулювання необхідне дослідження залежності параметру демпфера від
величини шумів). При оптимізації задається максимально допустиме
перерегулювання
. Параметри області (4) не змінюються, а параметр
демпфера (5) прийнятий чотирьом інтервалам квантування системи (для реальних
систем регулювання необхідне дослідження залежності параметру демпфера від
величини шумів). При оптимізації задається максимально допустиме
перерегулювання ![]() (в дослідженнях
приймалося допустимим перерегулювання 2%).
(в дослідженнях
приймалося допустимим перерегулювання 2%).
Для розрахунку початкової точки оптимізації авторами одержані формули по
результатам експериментального дослідження системи регулювання:
 (10)
(10)
Використання цих співвідношень може розглядатися як інженерна методика
настроювання каскадної САР з регулятором зі змінною структурою.
Проведено дослідження одержаних співвідношень
для визначення допустимої області їх застосування та для оцінки початкових
настройок системи на прикладі об’єкта з
параметрами:
![]() , (11)
, (11)
при їх варіації
в наступних межах:
 (12)
(12)
Для об’єкта (11) параметри настройки системи наступні:
![]() (13)
(13)
Методика
дослідження співвідношень (10) полягала у послідовній варіації кожного
параметра об’єкта у межах (12) при інших його параметрах, рівних (11)
(наприклад, ![]() –
варіюється коефіцієнт посилення випереджувальної ланки). Для кожної отриманої
комбінації параметрів об’єкта розраховані настройки за співвідношеннями (10) та
побудовано перехідні процеси, наведені на рис.2 (для цього та наступних
досліджень на рисунках показано проміжок часу 0–3000 с, оскільки починаючи з
цього часу перехідні процеси системи можна було вважати завершеними, проте
моделювання відбувалось протягом 10000 с):
–
варіюється коефіцієнт посилення випереджувальної ланки). Для кожної отриманої
комбінації параметрів об’єкта розраховані настройки за співвідношеннями (10) та
побудовано перехідні процеси, наведені на рис.2 (для цього та наступних
досліджень на рисунках показано проміжок часу 0–3000 с, оскільки починаючи з
цього часу перехідні процеси системи можна було вважати завершеними, проте
моделювання відбувалось протягом 10000 с):
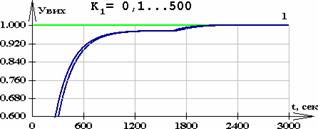
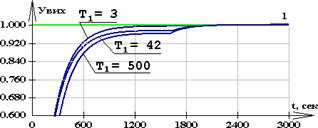
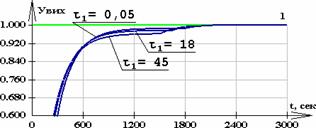
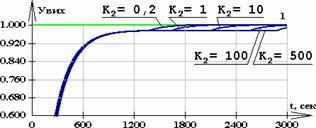
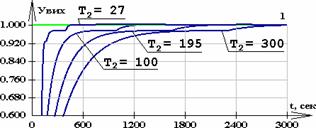
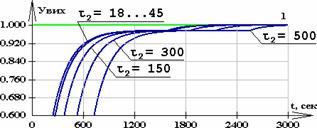
Рисунок 2. Перехідні процеси в системі при настройках,
розрахованих по співвідношеннях (10)
При збуренні по завданню коригуючого регулятора рівняння (10) дозволяють
розрахувати параметри настройок регуляторів САР для перехідних процесів в
системі близьких до аперіодичних у широких межах зміни параметрів об’єкта. Для
дослідженого об’єкта (11) при ![]() менше
0,2,
менше
0,2, ![]() менше 0,5
можлива поява статичної помилки регулювання. Для параметрів
менше 0,5
можлива поява статичної помилки регулювання. Для параметрів ![]() ,
, ![]() ,
, ![]() ,
, ![]() можливий
вихід за верхню межу, а для параметрів
можливий
вихід за верхню межу, а для параметрів ![]() ,
, ![]() верхня межа
залежить від часових параметрів
верхня межа
залежить від часових параметрів ![]() ,
, ![]() (що
пояснюється тим, що їх перевищення параметрів
(що
пояснюється тим, що їх перевищення параметрів ![]() ,
, ![]() суперечить
принципам побудови каскадних САР).
суперечить
принципам побудови каскадних САР).
Для вирішення задачі нелінійного програмування (1-9) використано
модифікацію методу покоординатного спуску для однієї змінної [3].
Початкова точка пошуку ![]() розраховується згідно
відношень (10). Для розрахунку початкового крок пошуку запропоноване
співвідношення:
розраховується згідно
відношень (10). Для розрахунку початкового крок пошуку запропоноване
співвідношення:
![]() . (14)
. (14)
Співвідношення
(10) дозволяють розрахувати таку початкову точку, що для зменшення часу
регулювання необхідно зменшувати ![]() . Цим задається напрям пошуку оптимальних значень параметрів
настройки. Показниками якості перехідних процесів прийняті час регулювання
. Цим задається напрям пошуку оптимальних значень параметрів
настройки. Показниками якості перехідних процесів прийняті час регулювання ![]() та перерегулювання
та перерегулювання ![]() . Для розрахунку часу регулювання по змодельованому
перехідному процесі проводився пошук моменту часу, коли значення виходу об’єкта
востаннє входило в допустиму область регулювання (при дослідженні прийнята
область 4%), при цьому тривалість перехідного процесу приймалась гарантовано
достатня для завершення перехідних процесів у системі (10000 с).
Перерегулювання оцінювалось як різниця між максимальним значенням виходу
об’єкта та його сталим значенням.
. Для розрахунку часу регулювання по змодельованому
перехідному процесі проводився пошук моменту часу, коли значення виходу об’єкта
востаннє входило в допустиму область регулювання (при дослідженні прийнята
область 4%), при цьому тривалість перехідного процесу приймалась гарантовано
достатня для завершення перехідних процесів у системі (10000 с).
Перерегулювання оцінювалось як різниця між максимальним значенням виходу
об’єкта та його сталим значенням.
Алгоритм розв’язування задачі (1 – 9):
Крок 1: Ввести ![]() згідно (10) і
згідно (10) і ![]() згідно (14),
згідно (14), ![]() . Змоделювати процес та одержати значення часу регулювання
. Змоделювати процес та одержати значення часу регулювання ![]() та величину
перерегулювання
та величину
перерегулювання ![]() .
.
Крок 2: ![]() .
.
Крок 3: ![]() .
.
Крок 4: Якщо ![]() , перехід до кроку 7, інакше – перехід до кроку 5.
, перехід до кроку 7, інакше – перехід до кроку 5.
Крок 5: Розрахунок
![]() та
та ![]() . Якщо умова
. Якщо умова ![]() не виконується, то
не виконується, то ![]() ,
, ![]() та перехід до кроку 2,
інакше – перехід до кроку 6.
та перехід до кроку 2,
інакше – перехід до кроку 6.
Крок 6: Якщо умова
![]() виконується, то
виконується, то ![]() та перехід до кроку 2,
інакше – перехід до кроку 7.
та перехід до кроку 2,
інакше – перехід до кроку 7.
Крок 7: Вихід з
алгоритму.
Проведені дослідження впливу величини кроку на кількість ітерацій пошуку
показують, що значення початкового кроку, розраховане за співвідношенням (14),
є оптимальним для більшості досліджених об’єктів, оскільки його зменшення
призводить до зростання кількості ітерацій, а збільшення може призвести до
перекиду через оптимальну точку, після чого відбувається повернення на попередню
точку та зменшення кроку пошуку (крок 5 алгоритму), що також збільшує кількість
ітерацій. Проте, це справедливо при використанні для розрахунку початкової
точки співвідношень (10), які дають настройки системи, близькі до оптимальних.
При використанні у якості початкової точки інших настройок можливе збільшення
кроку пошуку.
Проведено дослідження алгоритму оптимізації для визначення допустимої
області його застосування та для оцінки одержаних настройок системи для об’єкта
(11) при варіації його параметрів у межах (12). Для об’єкта (11) одержані наступні параметри настройки
системи:
![]() (15)
(15)
Методика дослідження алгоритму оптимізації полягала у послідовній варіації
кожного параметра об’єкта у межах (12) при інших його параметрах, рівних (11).
Для кожної отриманої комбінації параметрів об’єкта за співвідношеннями (10)
розраховано початкову точку оптимізації та проведено пошук оптимального
значення ![]() . Перехідні процеси для одержаних настройок системи
зображено на рис.3. Описане дослідження алгоритму відтворює роботу системи
регулювання, що містить контури адаптації та гіпотетичної ідентифікації. Для
дослідження системи регулювання лише з контуром адаптації було виконано
моделювання адаптивної системи при зміні параметрів об’єкта. Послідовність змін
параметрів об’єкта представлена сукупностями параметрів (16 – 18).
. Перехідні процеси для одержаних настройок системи
зображено на рис.3. Описане дослідження алгоритму відтворює роботу системи
регулювання, що містить контури адаптації та гіпотетичної ідентифікації. Для
дослідження системи регулювання лише з контуром адаптації було виконано
моделювання адаптивної системи при зміні параметрів об’єкта. Послідовність змін
параметрів об’єкта представлена сукупностями параметрів (16 – 18).
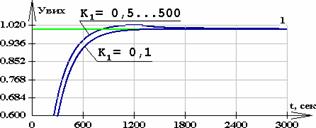
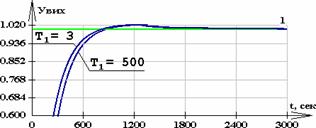
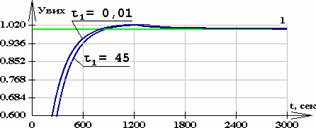
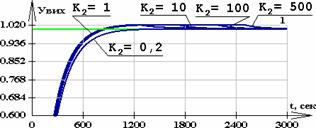
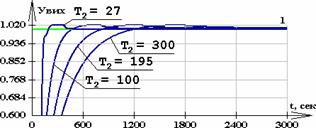
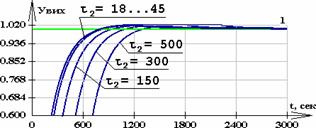
Рисунок 3. Перехідні процеси в системі при обчисленні
параметрів настройки згідно (10) і оптимізації коефіцієнта передачі ![]()
1) ![]() , (16)
, (16)
2) ![]() , (17)
, (17)
3) ![]() , (18)
, (18)
Початкові
настройки системи були розраховані для об’єкта (16) по співвідношенням (10):
![]() (19)
(19)
В
результаті адаптації системи з об’єктом (16) одержані оптимальні настройки:
![]() (20)
(20)
Початковими
настройками для об’єкта (17) приймались настройки (20). Результат оптимізації:
![]() (21)
(21)
Початковими
настройками для об’єкта (18) приймались настройки (21). Результат оптимізації:
![]() (22)
(22)
Таким
чином, видно, що всі параметри настройки системи, крім коефіцієнта передачі ![]() , залишаються постійними. Перехідні процеси в
системі до оптимізації та після неї наведено на рис.4:
, залишаються постійними. Перехідні процеси в
системі до оптимізації та після неї наведено на рис.4:
а) ![]()
б) ![]()
в) ![]()
1 –
перехідний процес до оптимізації; 2 – перехідний процес після оптимізації
Рисунок
4. Перехідні процеси до оптимізації та після неї в адаптивній САР
Було виконано дослідження
грубості системи регулювання для об’єкта (11). Результат показано на рис.5:
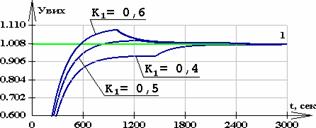
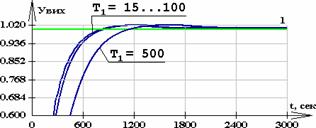
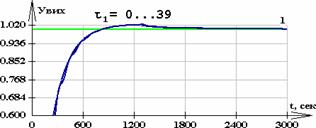
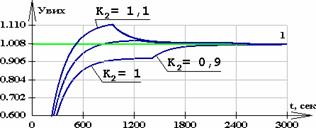
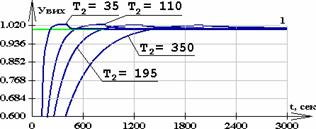
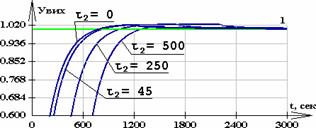
Рисунок 5. Дослідження грубості системи після проведення
оптимізації
При дослідженні грубості
настройки САР були знайдені по формулі (10) при ![]() . Дослідження проводилося шляхом моделювання системи
регулювання при варіаціях послідовно всіх параметрів об’єкта.
. Дослідження проводилося шляхом моделювання системи
регулювання при варіаціях послідовно всіх параметрів об’єкта.
Межі варіації: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ).
).
Значення параметрів, що не
варіюються, залишались рівними (11). Дослідження синтезованої каскадної системи
на грубість показує, що система являється грубою до зміни сталих часу та
транспортного запізнення обох ланок об’єкта регулювання, проте чутлива до зміни
їх коефіцієнтів передачі, тому для одержання САР, малочутливої до зміни
параметрів об’єкта в широких межах необхідне введення контуру оптимізації ![]() , тобто використання адаптивної системи керування
(див. рис.4).
, тобто використання адаптивної системи керування
(див. рис.4).
Висновки
Запропоновано інженерний метод настройки каскадної системи автоматичного
регулювання з коригуючим регулятором змінної структури, який забезпечує
одержання аперіодичних перехідних процесів, близьких до оптимальних по
швидкодії. Одержані авторами співвідношення можуть бути використані в широких
межах зміни параметрів об’єкта.
Розроблено алгоритм автоматичного настроювання каскадної САР. Проведене
дослідження роботи алгоритму показує, що він може бути використаний на стадії
розробки системи автоматизації, наладці, а також в адаптивних системах при
оптимізації ![]() та адаптивних
системах з контурами ідентифікації та адаптації.
та адаптивних
системах з контурами ідентифікації та адаптації.
Дослідження системи регулювання на грубість показує, що система є
малочутливою до зміни часових параметрів об’єкта в широких межах, а при
наявності контуру оптимізації ![]() система є
грубою до всіх параметрів об’єкта.
система є
грубою до всіх параметрів об’єкта.
Література:
1. Загарий Г.И., Шубладзе А.М. Синтез
систем управления на основе критерия максимальной степени устойчивости. – М.:
Энергоатомиздат, 1998. – 104 с.
2. Уланов А.Г. Теория и разработка
адаптивных регуляторов с переменной структурой: Автореферат диссертации на
соискание ученой степени д-ра технич. наук/ Ин-т проблем управления – М., 1977.
– 19 с.
3. Методы оптимизации в теории
управления: Учебное пособие / И.Г. Черноруцкий. – СПб.: Питер, 2004. – 256 с.:
ил.
Матковський П.Ю. __________ Мовчан
А.П. __________