Муратов А., Кайнарбеков А.К., Бекмамбет К.
Алматы, Республика Казахстан
КИНЕМАТИКА ДВИЖИТЕЛЯ
ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ТИПА «ҚАҢБАҚ»
Шагающее колесо так
называемый «қаңбақ» в переводе на русский язык «перекати поле» имеет простейшую
конструкцию и состоит всего из двух элементов: корпуса ступицы и штанги, которые двигаются
относительно друг друга при перекатывании колеса. Кинематическая модель
шагающего колеса «қаңбақ» может быть
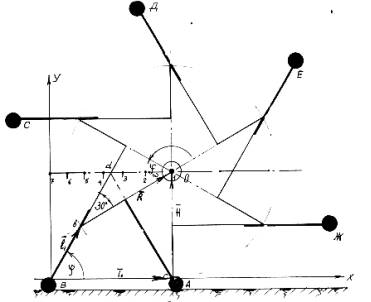
представлена в виде замкнутых контуров (рисунок 1).
![]()
Рисунок 1. Кинематика ШК
![]()
или в скалярной форме
l1cosf+Rcos(f-30˚) = L,
l1sinf+Rsin(f-30˚)=H![]()
Определим
значение l1 из второго уравнения системы
Подставив
в первое уравнение системы, получим
![]() . (1)
. (1)
Эта формула показывает положение центра ступицы О в зависимости от угла
поворота φ в системе
координат ХВУ. Постоянные
значения Н = R
устанавливаются при
проектировании механизма колеса. При этом необходимо учесть, что центр ступицы О движется по прямой.
Определим положение центра ступицы L1, L2,......Ln в
зависимости от ряда значений φ1, φ2, φ3,….. φ n.
Пусть φ1=60˚, тогда
![]()
При φ2=70˚
![]()
При φ3=80˚
![]()
При φ4=90˚
![]()
При φ5=100˚
![]()
При φ6=110˚
![]()
При φ7=120˚
![]()
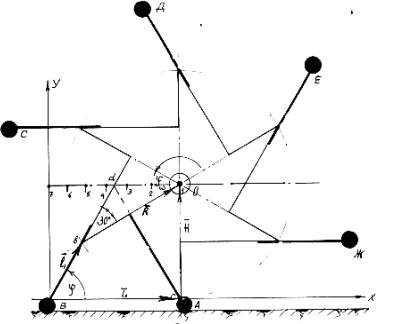
Рисунок 2. Кинематика шагающего колеса
На рисунке 2 показаны положения центра ступицы 1,2,3,4,5,6 и 7 в зависимости от угла
поворота корпуса ступицы при φ1=60˚, φ2=70˚, φ3=80˚, φ4=90˚, φ5=100˚, φ6=110˚ и φ7=120˚.
Следовательно, можно сделать вывод, что при
равномерном вращении колеса движение центра ступицы замедляется.
Рассмотрим изменение значений V(φ) аналога
скоростей в зависимости от тех же значений угла поворота φ.
![]()
Окончательно, при Н=R получим
![]() . (2)
. (2)
При φ1=60˚,
![]() м/рад.
м/рад.
При φ2=70˚
![]() м/рад.
м/рад.
При φ3=80˚
![]() м/рад.
м/рад.
При φ4=90˚
![]() м/рад.
м/рад.
При φ5=100˚
![]() м/рад.
м/рад.
При φ6=110˚
![]() м/рад.
м/рад.
При φ7=120˚
![]() м/рад.
м/рад.
Рассмотрим закон изменения ускорения центра ступицы:
 .
.
При φ1=60˚,
 м/рад∙с.
м/рад∙с.
При φ2=70˚
 м/рад∙с.
м/рад∙с.
При φ3=80˚
 м/рад∙с.
м/рад∙с.
При φ4=90˚
![]() м/рад∙с.
м/рад∙с.
При φ5=100˚
 м/рад∙с.
м/рад∙с.
При φ6=110˚
 м/рад∙с.
м/рад∙с.
При φ7=120˚
 м/рад∙с.
м/рад∙с.
Графики полученных зависимостей L(f), V(f)
и а(f) показаны на рисунке 3, из которых видно, что в конце
хода (начиная с φ=90˚) ускорение а(φ) растет.

Рисунок 3. Графики изменений закона движения, скорости
и ускорения
Это значит, что поступательно перемещающаяся масса
экипажа с колесами развивает силу инерции, направленную прямо противоположно
вектору скорости. В конце хода сила инерции за период каждого шага становится
движущим фактором.
ЛИТЕРАТУРА
1. Муратов А.М., Кайнарбеков А.К. и др. Шагающие движители: Учебное пособие.
«Бастау», г Алматы, 2000. 182с.
2. Муратов А.М., Кайнарбеков А.К. «Гусенично-шагающий
движитель транспортного средства»: пред. патент РК №11006, г. Алматы,
14.11.2001, бюл.№12.
3. А.Кайнарбеков,
А.Омаров, А.Муратов А. Хикаят шагающего колеса. «LAP» LAMBERT Academic
Publishing, ,Saarbrücken, Germany, 2014.
4. Омаров А.Д., Муратов А., Кайнарбеков А., Бекмамбет
К.М. «Бездорожное транспортное средства»: г. Алматы, 2015г. 182стр.