Сніжко Є.М., Шиман Ю.І.
Дніпропетровський національний університет
Відтворення двовимірних зображень
при ультразвуковому скануванні
Метою роботи є створення
апаратно-програмної системи для ультразвукового сканування приміщень,
визначення взаємного розташування та характеристик предметів. Ультразвукові
хвилі в діапазоні до 1ГГц застосовуються в наукових, медичних та технічних дослідженнях для вивчення будови та структури
речовини. Швидкість звуку залежить від фізичних властивостей середовища, у
якому поширюються звукові коливання, та зазвичай є сталою для даної речовини при заданих зовнішніх умовах
незалежно від частоти хвилі або її амплітуди. Звук в рідинах і газах описується рівняннями
Ейлера, неперервності та адіабатичного
процесу[1]:
![]() ;
; ![]()
![]() .
.
Тут ![]() — швидкість зміщення частинок, ρ — густина, p — тиск, γ —
адіабатичний показник. Поширення звуку — адіабатичний процес, тому що воно
відбувається швидше, ніж поширення тепла. Як
наслідок, при проходженні звуку температура дещо зростає в областях стиску і
спадає, при розширенні. Вважаючи збурення при проходженні звуку малими, ця
система рівнянь зводиться до хвильового
рівняння
— швидкість зміщення частинок, ρ — густина, p — тиск, γ —
адіабатичний показник. Поширення звуку — адіабатичний процес, тому що воно
відбувається швидше, ніж поширення тепла. Як
наслідок, при проходженні звуку температура дещо зростає в областях стиску і
спадає, при розширенні. Вважаючи збурення при проходженні звуку малими, ця
система рівнянь зводиться до хвильового
рівняння
![]() ,, , де
,, , де ![]() .
.
Величина c визначає швидкість звуку. Для
ідеального газу![]() , де R — газова стала, m — молярна маса. Для повітря у диапазоні від -50оС
до +50оС залежність швидкості звуку від температури ( за шкалою
Цельсія) описується рівнянням C= 300+0,6(T+50) м/с. Швидкість звуку в повітрі за кімнатної температури дорівнює 341 м/с, або в
перерахунку на тривалість сигнального імпульсу 29 мc/см.
, де R — газова стала, m — молярна маса. Для повітря у диапазоні від -50оС
до +50оС залежність швидкості звуку від температури ( за шкалою
Цельсія) описується рівнянням C= 300+0,6(T+50) м/с. Швидкість звуку в повітрі за кімнатної температури дорівнює 341 м/с, або в
перерахунку на тривалість сигнального імпульсу 29 мc/см.
Система
сканування містить ультразвуковий датчик відстані, електричний сервомотор для
позиціонування датчика за азимутом, мікроконтролерний модуль Arduino для проведення
вимірів, поєднаний каналом зв’язку з комп’ютером. Канал може бути провідний (USB, Ethernet) вбо бездротовий (Bluetooth, WiFi), для чого використані відповідні блоки Arduino[2]. Комп’ютерна програма виконує
візуалізацію та зберігання результатів сканування. Ультразвуковий модуль
сканування оснащений системою автоматичного калібрування за температурою, для
цього використовується цифровий термометр DS18B20, який підключається до
платформи Arduino. Робоча
частота ультразвукового датчика відстані дорівнює 40 КГц.
Рис. 1. Структура системи ультразвукового сканування
Характеристики
датчика наведено в табл.
1, а сервомотора – в
табл..2.
Технічні
характеристики датчика відстані HC-SR04 Таблиця 1
|
Живлення |
5
В постійного струму |
|
Струм
спокою |
2
мА |
|
Ефективний
кут |
15
градусів |
|
Вимірюєма
відстань |
2-500
см |
|
Роздільна
здатність |
0.3
см |
Характеристики сервомотора S3003 Futaba Servo. Таблиця 2
|
Робоча напруга |
4.8-6 вольт |
|
Робоча температура |
Від -20 до +60 °C |
|
Робоча швидкість(4.8 В) |
0.23 сек/60 град (без навантаження) |
|
Пусковий момент(4.8 В) |
3.2 кг/см |
|
Струм споживання(4.8 В) |
7.2 мА/холостий хід |
Програмне забезпечення для мікроконтролера Arduino Uno написане мовою Wiring. Програма подає сигнал
на контакти датчика який генерує ультразвукові імпульси, та сприймає відповідний сигнал до мікроконтролера.
Після цього подається сигнал на сервомотор, який змінює напрям датчика.
Програма для комп’ютера написана мовою Processing. Графічний вигляд інтерфейсу наведений на рис.2. При заповненні буфера
даними програма відображає ці дані у вигляді розподілу відстані за кутом
спрямованості[3].
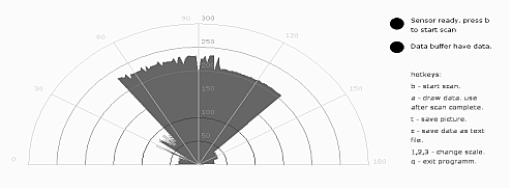
Рис. 2. .Результат сконування приміщення з суцільними перешкодами
Для дослідження характеристик була
проведена серія експериментів зі сканування навколишнього середовища. Для
проведення цього експерименту використовували вільний простір лабораторії з
встановленою малою за розміром пластиною (товщина пластини 1 см). В досліді цю
перешкоду було успішно виявлено на відстані 115 см. Була проведена серія
експериментів з детектування малих об’єктів на різних відстанях з метою
визначення похибки вимірювання дистанції до малих об’єктів. Діаграма на рис.3 описує результати розрахунків похибки визначення.
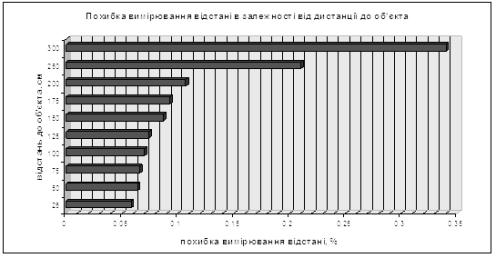
Рис.3.. Похибки
вимірювання відстані до малих об’єктів.
Другим методом з дослідження роздільної здатності було встановлення суцільної перешкоди по периметру сканування датчика з малим отвором у ньому. Метою досліду була перевірка здатності модуля знаходити малі щілини на шляху сканування. В результаті проведення експерименту модуль виявив дефект завтовшки 1,5 см у суцільній перешкоді на відстані до 3 м. Також було проведення вимірювання похибки. Результати розрахунків наведено на рис.4.
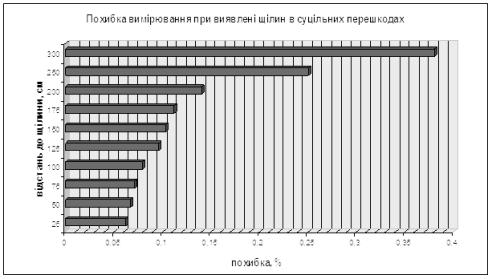
Рис. 4. Похибки
вимірювання при виявленні щілин у суцільних перешкодах
Висновки та подальші перспективи досягнень
Розроблений макет ультразвукового модуля сканування
площини на основі платформи Arduino Uno, ультразвукового датчика відстані
HC-SR04 та сервомотора S3003 Futaba Servo, програмне забезпечення для взаємодії
комп’ютера з ультразвуковим модулем сканування, візуалізації та збереження
результатів. Проведені експериментальні дослідження похибок при двовимірному скануванні
на відстані до 5м. Результати роботи можна використати в робототехніці, охоронних системах, для різноманітних задач орієнтації у приміщеннях.
Список літератури
1. Агранат
Б.А., Дубровин М.Н. Основы физики и техники
ультразвука.
– М., «Высшая
школа», 1987.
2. Reas C., Fry B., Getting started with
Arduino, – O’Reilly, 2010
3. Fry B., Visualising data – O’Reilly, 2007