Технические науки/11. Робототехника
Д.т.н. Ивель
В.П., к.т.н. Герасимова Ю.В.
Северо-Казахстанский
государственный университет
им.
М.Козыбаева, Казахстан
Исследование влияния ветроволновых возмущений на
качество управления подводными роботами
Вопросам исследования пространственного
движения подводных роботов (аппаратов) в условиях помех в литературе,
посвященной морской тематике, до последнего времени уделялось незаслуженно мало
внимания. Между тем, качество и точность управления глубиной погружения подводных
роботов (ПР) во многом зависит от уровня внешних возмущений, внутренних помех и
инструментальных погрешностей измерений.
В данной статье будет рассмотрен вопрос
влияния морского волнения и морского течения, которые являются основными
внешними источниками возмущающих сил, действующих на ПР при его погружении и
стабилизации на заданной глубине. Морское волнение, которое может оказать
воздействие, включает два типа волн: ветровые волны и внутренние волны
различного происхождения.
При составлении математической модели
ветровых волн волновой процесс можно представить как синусоидальное силовое воздействие, которое оказывают вертикально
перемещающиеся частицы воды на корпус ПР. Также необходимо учитывать, что
амплитуда волнового воздействия на ПР является некоторой функцией заданной
глубины стабилизации ПР. В этом случае уравнение вертикального движения
аппарата (робота) [1] примет вид системы уравнений (1).
Первое уравнение системы (1) соответствует
турбулентному режиму обтекания, характерного для стадии приведения ПР на
заданную глубину. Второе уравнение соответствует ламинарному режиму обтекания,
характерного для стадии стабилизации робота на заданной глубине.
Экспериментальные данные, приведенные в [2], позволяют утверждать, что
турбулентный режим возникает при скорости обтекания жидкостью корпуса аппарата
(робота) больше 0,5 м/с. Третье уравнение из (1) является уравнением
скорости вертикального перемещения частиц жидкости относительно неподвижной
системы координат.
 (1)
(1)
где
МПР, M – присоединенная масса, масса ПР с учетом
присоединенной массы жидкости;
k1, k2 – коэффициенты,
которые в общем случае являются нестационарными величинами и зависят от
следующих параметров: вертикальной составляющей скорости движения ПР,
коэффициента лобового сопротивления, плотности воды; характерной площади;
kобж×h –
возмущающая сила, обусловленная изменением плавучести ПР под влиянием плотности
воды и обжатия корпуса, здесь kобж – коэффициент обжатия корпуса ПР, а h – текущая глубина
нахождения ПР;
q0 – начальная плавучесть;
v –
скорость вертикального движения подводного аппарата (робота);
AВ, wВ, vВ –
амплитуда, частота и скорость движения частиц воды относительно неподвижной
системы координат.
Структурная схема объекта управления,
соответствующая первому уравнению из (1),
представлена на рисунке 1.
Имеются экспериментальные данные [3] о максимальных
значениях элементов ветровых волн для глубокого моря при разной бальности морского волнения. Эти данные, полученные
уравнения (1) и структура объекта управления с учетом ветроволнового возмущения
(рис. 1) позволили составить Simulink-модель
для исследования влияния ветроволнового волнения на процесс стабилизации ПР на
заданной глубине.
Рисунок 1. Структура объекта управления
с учетом ветроволнового возмущения
Эксперименты проводились для двух режимов,
определяющих состояния ПР: приведения и стабилизации. В статье представлены результаты моделирования для режима стабилизации
(рис. 2), соответствующего выполнению условия vВ<0,5 м/с. Так было проведено три модельных
эксперимента по следующим данным: без воздействия ветровых волн; амплитуда
волны на глубине стабилизации ПР АВv =
0,129 м, частота волновых колебаний w =
1,17 рад/с; амплитуда волны на глубине
стабилизации ПР АВv =
0,373 м, частота волновых колебаний w =
0,92 рад/с.
Проведенные исследования с использованием
пакета Simulink показали,
что при волнении в V баллов на глубине 20 м установившийся
автоколебательный процесс (рис. 2, а)
в системе своих параметров не меняет. При волнении в шесть баллов амплитуда
колебаний увеличивается примерно на четверть (рис. 2, б), при этом расход энергии увеличивается в два раза. При волнении
в семь баллов (рис. 2, в) наступает
переходной режим, т.е. режим пограничный между автоколебательным процессом и
режимов вынужденных колебаний. Сами автоколебания уменьшаются и по амплитуде, и
по частоте, а на фоне автоколебательного процесса просматриваются вынужденные
колебания с частотой ветровой волны. Таким образом ветроволновое воздействие, оказывает непосредственное влияние на
энергетические затраты, необходимые при управлении ПР.
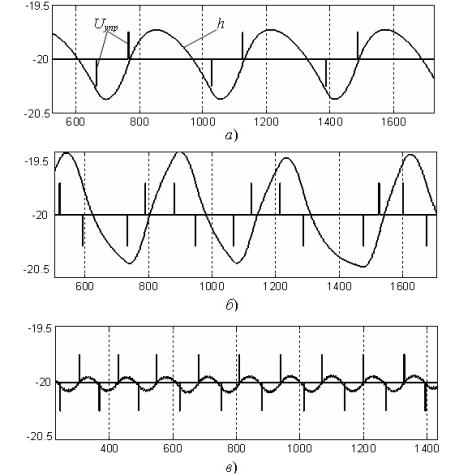
Рисунок 2. Кривые выходных
процессов в системе на глубине 20 м: без воздействия ветровой волны (а), при волне с параметрами АВv = 0,129 м, w =
1,17 рад/с (б), при волне с параметрами АВv = 0,373 м, w =
0,92 рад/с (в)
Наиболее простым средством для устранения
чрезмерных затрат электроэнергии при ветроволновых воздействиях на ПР является
низкочастотная фильтрация. К более эффективным относятся методы адаптивной фильтрации.
Литература:
1.
Герасимова
Ю.В. Модель
стабилизатора глубины погружения подводного аппарата // Оралдың
ғылым жаршысы. Уральск,
2009. – С. 67-72.
2. "Разработка и создание макета
микропроцессорного блока управления дрейфующего комплекса". Отчет по НИР и
ОКР, отв. исп. В.П. Ивель – Петропавловск, АО "ЗИКСТО", 2008. – 120
с., ил.
3. Глинский H. Т.,
Внутренние волны в океанах и морях – M.: Мир, 1973. – 274 с., ил.