Кладун Е.А.
Национальный технический университет
Украины «КПИ»
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ В УПРУГОМ
ПОДВЕСЕ ГИРОСКОПА
Опоры
с трением упругости нашли применение в системах, имеющих ограниченные углы
поворота. Практически, такие опоры не создают момента сил трения (так как
величина трения упругости очень мала), имеют невысокую точность фиксации
направления оси, но удовлетворительно работают в условиях вибрации. В
зависимости от вида деформации упругого элемента различают опоры, работающие на
изгиб, и опоры, работающие на кручение – (торсионы).
Простой
ленточный шарнир представляет собой пластину, связывающую неподвижное звено с
перемещающимся звеном. Такой шарнир применяется, например, для подвеса
маятника.
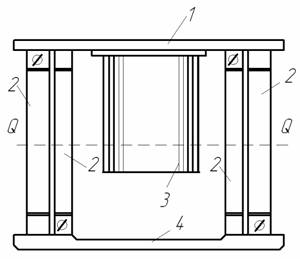
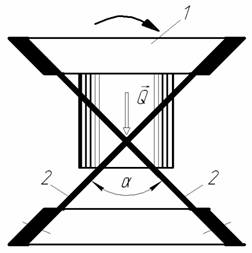
Рис. 1.
Перекрестный упругий шарнир для подвеса двухстепенного
гироскопа
Упругий
шарнир состоит из рычага, двух пружинящих пластин и неподвижного основания.
Такой шарнир используется при небольших углах поворота подвижной части (1…2
градуса). В качестве центра вращения принимается след, образованный пересечением
продолжений средних плоскостей упругих пластин.
На рис. 1 показан
перекрестный шарнир для подвеса двухстепенного гироскопа 3, который крепится на
плате 1. Плата 1 закреплена на основании 4 с помощью опоры, состоящей из
четырех упругих пластин 2, пересекающихся под углом a=60°…90° и
прикрепленных своими концами к основанию 4 и плате 1. Угол поворота таких
шарниров может достигать 30°.
Перекрестный упругий шарнир как система с распределенными
параметрами. Расчетная модель упругого взаимодействия подвеса с проникающим
акустическим излучением. Примем для конкретности, угол  и проанализируем
механизм упругого взаимодействия акустического излучения с подвесом
двухстепенного гироскопа, установленного на двух перекрестных шарнирах (рис.
1).
и проанализируем
механизм упругого взаимодействия акустического излучения с подвесом
двухстепенного гироскопа, установленного на двух перекрестных шарнирах (рис.
1).
Чтобы лучше уяснить
природу этого явления, ограничимся рассмотрением только низших форм колебаний.
Причем, для наглядности достаточно изучить лишь формы колебаний по одному из
направлений.
Пусть под воздействием акустической
волны упругие пластины совершают изгибное движение, реализуя только первую,
низшую форму. Тогда в нормальном направлении одна получит перемещение ![]() , другая –
, другая – ![]() , которые представленные в виде составляющих
, которые представленные в виде составляющих ![]() и
и ![]() , позволяют установить, что условная ось поворота подвижной
части гироскопа будет иметь перемещение вдоль оси
, позволяют установить, что условная ось поворота подвижной
части гироскопа будет иметь перемещение вдоль оси ![]() –
– ![]() и вдоль оси
и вдоль оси ![]() –
– ![]() (рис. 2, а). Если эти
формы проявляются синфазно на обоих перекрестных шарнирах, то происходят
угловые колебания относительно условной выходной оси прибора
(рис. 2, а). Если эти
формы проявляются синфазно на обоих перекрестных шарнирах, то происходят
угловые колебания относительно условной выходной оси прибора ![]() (рис.
(рис. ![]() (рис. 2, в).
(рис. 2, в).
Рис. 2.
Механизм упругого взаимодействия акустического излучения
с прибором
на упругом подвесе
В том случае, когда
первые формы изгибных колебаний пластин имеют вид, представленный на рис. 2, б,
картина перемещений гироскопа
меняется и при синфазном
перемещении крайних точек оси ![]() гироскоп совершает
поступательные перемещения вдоль оси
гироскоп совершает
поступательные перемещения вдоль оси ![]() (рис. 2, д), а при
противофазном имеют место угловые колебания относительно выходной оси (рис. 2,
е).
(рис. 2, д), а при
противофазном имеют место угловые колебания относительно выходной оси (рис. 2,
е).
Таким образом, подвес
гироскопа при акустическом нагружении будет совершать прямолинейные колебания
относительно осей ![]() и угловые колебания
относительно осей
и угловые колебания
относительно осей ![]() (рис. 2, ж). Как
известно, в этом случае двухстепенной дифференцирующий гироскоп имеет
систематическую погрешность, а двухстепенной интегрирующий гироскоп –
систематический дрейф. Кроме того, в выходном сигнале прибора наблюдаются
периодические составляющие, которые, однако, представляют второстепенный
интерес, так как разработано множество средств исключения, либо уменьшения, их
влияния.
(рис. 2, ж). Как
известно, в этом случае двухстепенной дифференцирующий гироскоп имеет
систематическую погрешность, а двухстепенной интегрирующий гироскоп –
систематический дрейф. Кроме того, в выходном сигнале прибора наблюдаются
периодические составляющие, которые, однако, представляют второстепенный
интерес, так как разработано множество средств исключения, либо уменьшения, их
влияния.
Двухстепенные
гироскопические приборы нашли широкое применение в качестве чувствительных
элементов гироскопических стабилизированных платформ. Поэтому требование
высокой точности к их показаниям является
а)
б)
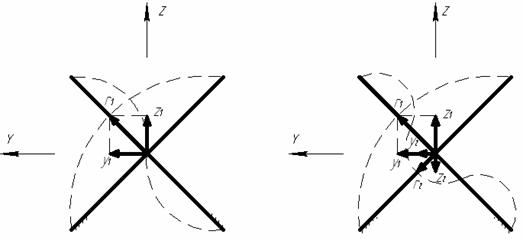
Рис. 3. Влияние форм колебаний пластин на движение
выходной оси
прибора
ключевым в вопросах точности
построения ориентирных направлений на подвижных объектах. Это в первую очередь
относится к ракетам-носителям (РН), двигательные установки которых создают
весьма высокие звуковые давления (до 180 дБ)
в достаточно широком частотном диапазоне – 40…10000 Гц.
Анализ влияния более
высоких форм колебаний на динамику подвеса показывает, что принципиально
картина прохождения звуковой волны не изменяется, в то же время, она несколько
усложняется. Так, наиболее благоприятным для прибора является сочетание 1 формы
колебаний одной пластины с четными формами колебаний другой, т.е. с 2, 4, 6 и
т.д. (рис. 3, а). В этом случае, как видно, перемещение выходной оси прибора в
направлении оси ![]() обусловлено только
колебаниями первой пластины
обусловлено только
колебаниями первой пластины ![]() , а в направлении оси
, а в направлении оси ![]() – отсутствует. Если же
имеет место сочетание первой формы колебаний одной пластины и нечетных форм (1,
3, 5, 7 и т.д.) другой – наблюдается наиболее сложное движение оси подвеса –
как в направлении оси
– отсутствует. Если же
имеет место сочетание первой формы колебаний одной пластины и нечетных форм (1,
3, 5, 7 и т.д.) другой – наблюдается наиболее сложное движение оси подвеса –
как в направлении оси ![]() , так и в направлении оси
, так и в направлении оси ![]() (рис. 3, б). Имеет
место как поступательная, так и угловая акустическая вибрация подвеса.
(рис. 3, б). Имеет
место как поступательная, так и угловая акустическая вибрация подвеса.
Таким образом, упругое
взаимодействие подвеса гироскопа с акустическим излучением приводит к
возмущенному движению прибора и, как следствие, к возникновению погрешностей
измерения.
Оставляя в стороне вопрос
прохождения акустической волны через собственно гироскоп, механическую модель
расчета взаимодействия волны избыточного давления ![]() с подвесом можно
представить в виде двух упругих пластин не связанных между собой, на которые
действует плоская монохроматическая волна (рис. 4). Здесь 1, 2, 3 –
соответственно падающая, отраженная и прошедшая волны через первую пластину, 1¢,2¢,3¢ –
через вторую. Угол a примем равным
с подвесом можно
представить в виде двух упругих пластин не связанных между собой, на которые
действует плоская монохроматическая волна (рис. 4). Здесь 1, 2, 3 –
соответственно падающая, отраженная и прошедшая волны через первую пластину, 1¢,2¢,3¢ –
через вторую. Угол a примем равным ![]() .
.
Целый ряд вопросов
динамики пластин, их физической структуры и др. при воздействии акустического
излучения остается до конца не изученным. Прежде всего это относится к учету
граничных условий при изучении пластин конечной протяженности, что приводит к
бесконечной системе уравнений, описывающих механическую модель.
Характерной особенностью
геометрии граничных поверхностей упругих тел является наличие угловых линий.
Исходя из постановки граничных задач теории упругости в смещениях (на основе
векторного уравнения Г. Ламе), можно выделить три основных граничных задачи –
задание на поверхности тела вектора внешних усилий, задание на поверхности тела
вектора упругих смещений и смешанная задача, состоящая в том, что на части
граничной поверхности заданы усилия, а на остальной ее поверхности определен
вектор смещений.
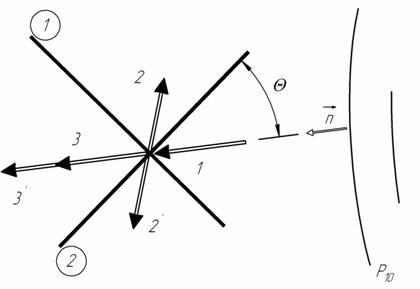
Рис. 4.
Механизм прохождения волны давления через упругий подвес
В настоящее время
получили развитие два подхода – метод однородных решений, впервые примененный
П.А. Шиффом и В.А. Стекловым, и метод точных решений Г. Ламе. Первый стал
мощным средством асимптотического анализа приближенных теорий оболочек.
Предпосылкой возрождения второго стало наличие стройной теории бесконечных
систем и развитие средств вычислительной техники. Здесь уместно упомянуть об
открытии Б.М. Кояловичем закона асимптотических выражений, который позволил
установить отсутствие особенностей в выражениях для напряжений в угловых точках
и решить первую основную граничную задачу.