К.т.н. Лустенков М.Е., к.т.н. Макаревич Д.М., Хадкевич И.Ю.
Белорусско-Российский университет, Могилев, Республика Беларусь
Кинематический анализ редукторно-дифференциальных
механизмов на базе планетарных шариковых передач
Принцип работы
планетарных шариковых передач (ПШП) описан в [1] и основывается на контактном
(клиновом) взаимодействии тел качения (шариков) с профильными поверхностями
кулачков и пазов деталей передачи, образующих беговые дорожки. Проанализируем
схему двухступенчатой ПШП, изображенной на рис. 1. Передача состоит из ведущего
вала 1, на котором расположены два внутренних кулачка 1’ и 1” с числом периодов
![]() и
и ![]() соответственно. Эти
кулачки посредством тел качения 4 взаимодействуют с неподвижным звеном передачи
– наружным кулачком 3’ с числом периодов
соответственно. Эти
кулачки посредством тел качения 4 взаимодействуют с неподвижным звеном передачи
– наружным кулачком 3’ с числом периодов ![]() и выходным звеном –
наружным кулачком 3” с числом периодов
и выходным звеном –
наружным кулачком 3” с числом периодов ![]() . Передача состоит из двух ступеней. Первая ступень
сконструирована по первой кинематической схеме (аналог схемы 2k-h для зубчатых планетарных передач с
ведомым водилом и остановленной коронной шестерней). Вторая ступень не имеет
остановленных звеньев и может быть названа условно «дифференциальной» (условно,
потому что вся система все равно имеет одну степень свободы и является
редуктором). Таким образом, механизм данного типа назовем
редукторно-дифференциальным механизмом (РДМ).
. Передача состоит из двух ступеней. Первая ступень
сконструирована по первой кинематической схеме (аналог схемы 2k-h для зубчатых планетарных передач с
ведомым водилом и остановленной коронной шестерней). Вторая ступень не имеет
остановленных звеньев и может быть названа условно «дифференциальной» (условно,
потому что вся система все равно имеет одну степень свободы и является
редуктором). Таким образом, механизм данного типа назовем
редукторно-дифференциальным механизмом (РДМ).
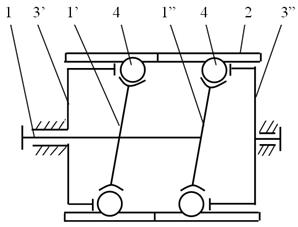
Рис.1. Кинематическая схема
редукторно-дифференциального механизма
Два подвижных звена 1’ и
2 первой ступени РДМ являются входными звеньями для второй ступени, вынуждая
третье звено вращаться с редукцией (мультипликацией). Звено 1’ жестко соединено
со звеном 1’’, а звено 2 для первой ступени имеет число пазов ![]() , а для второй ступени -
, а для второй ступени - ![]() .
.
Определим передаточное
отношение всего механизма, используя формулу Виллиса для двух ступеней (звено 2
– водило, обозначенное h). Для первой (![]() ) и второй ступеней соответственно, данная формула запишется:
) и второй ступеней соответственно, данная формула запишется:
![]()
![]() (1)
(1)
Выразив из выражений (1)
угловую скорость водила 2 (ωh) и приравняв эти выражения, получим:
 (2)
(2)
Из уравнения (2) находим
передаточное отношение редуктора.
 (3)
(3)
Если в рассматриваемой
кинематической схеме (рис. 1) принять ![]() и объединить две
цепочки тел качения в одну, то получим схему передачи, изображенной на рисунке
2. Данную передачу можно назвать трехсинусоидной [2], так как происходит
взаимодействие трех звеньев, каждое из которых содержит беговую дорожку
синусоидальной формы. В диссертации [3] изложена начальная стадия
кинематического анализа трехсинусоидных передач. Однако целесообразность
дальнейшей разработки в этом направлении сомнительна, по крайней мере, для
передач цилиндрического типа, так как трехсинусоидные передачи в классическом
исполнении обладают рядом недостатков: ограниченное количество шариков передающих
нагрузку, а их кинематические возможности не превосходят возможности обычных
ПШП.
и объединить две
цепочки тел качения в одну, то получим схему передачи, изображенной на рисунке
2. Данную передачу можно назвать трехсинусоидной [2], так как происходит
взаимодействие трех звеньев, каждое из которых содержит беговую дорожку
синусоидальной формы. В диссертации [3] изложена начальная стадия
кинематического анализа трехсинусоидных передач. Однако целесообразность
дальнейшей разработки в этом направлении сомнительна, по крайней мере, для
передач цилиндрического типа, так как трехсинусоидные передачи в классическом
исполнении обладают рядом недостатков: ограниченное количество шариков передающих
нагрузку, а их кинематические возможности не превосходят возможности обычных
ПШП.
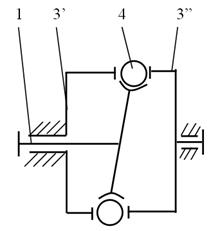
Рис.2. Схема цилиндрической трехсинусоидной передачи
Каждая из шести
кинематических схем ПШП обеспечивает вращение двух подвижных звеньев.
Поочередно соединяя эти звенья с двумя звеньями из трех звеньев второй ступени,
мы образуем механизм с одной степенью свободы, в котором выходным звеном
является третье подвижное звено второй ступени. Таким образом, на базе каждой
кинематической схемы можно реализовать 6 кинематических схем РДМ, а всего
реализуемых схем РДМ – 36.
Нами предлагается
следующее обозначение РДМ (рис. 3): ![]() .
.
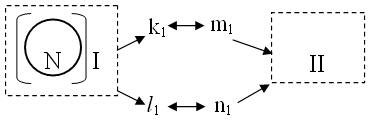
Рис.3. Структура обозначения
кинематических схем РДМ: N – номер кинематической схемы первой ступени; k1, l1 – подвижные звенья первой ступени; m2, n2 – входные звенья второй ступени
Передаточное отношение
РДМ на рис. 3 в цифровом и буквенном обозначении:
![]() (4)
(4)
Выделять в отдельную
структурную группу передачи с измененным порядком следования редукторной и
дифференциальной ступеней на наш взгляд нецелесообразно. Передаточное отношение
в этом случае останется такое же, лишь у чисел периодов изменяться индексы.
 (5)
(5)
Сравнивая РДМ с простыми
двухступенчатыми передачами со ступенями, соединенными последовательно можно
отметить следующее:
- РДМ имеют большую
жесткость, менее трудоемки в изготовлении и сборке, так как два звена для
первой и второй ступени зафиксированы на общем основании;
- РДМ имеют меньшую
нагрузочную способность, так как реактивный момент воспринимает только одно
звено. Необходимо также решать вопрос о снижении влияния циркуляции внутренних
мощностей.
Литература:
1. Лустенков М.Е., Макаревич Д.М. Планетарные
шариковые передачи цилиндрического типа. – Могилев: Бел.-Рос. ун-т, 2005. – 123
с.: ил.
2. Планетарная передача:
а. с. 1276869 СССР, кл. F16 Н13/08, H25/22 / Р.М. Игнатищев. - №384631-25/28; 3861517/25-28;
заявл. 29.01.85; опубл. 15.12.86// Открытия. Изобрет. – 1986. – Бюл.№6. – 2с.
3. Игнатищев Р.М.
Синусошариковые передачи с примером использования их варианта в забойных
машинах для бурения скважин: Дис... докт. техн. наук: 05.02.18, 05.02.02 -
Защищена 15.05.90; Утв. 4.01.91. – Л., 1990. - 253 с:. ил.