Тищенко И.В., Суков С.Ф.
Донецкий национальный технический университет, Украина
Применение FUZZY – регулирования при управлении теплообменным аппаратом
Теплообменный аппарат(тепломассообменный аппарат) —
устройство,
в котором одно вещество — горячий теплоноситель — передает теплоту другому веществу — холодному теплоносителю. В качестве теплоносителей в тепловых аппаратах используются разнообразные вещества в самом широком диапазоне давлений и температур
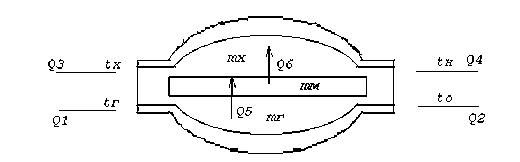
Рис.1-Расчетная схема ТО
Теплообменник имеет 2 канала: горячего и холодного
теплоносителя, каждый из которых характеризуется температурами на
входе и на выходе (соотвественно
холодного и нагретого в канале
холодного теплоносителя и горячего и охлажденного в канале горячего теплоносителя ). Каждый из
потоков теплоносителя обладает своей тепловой энергией. Теплообмен происходит
через металлическую пластину, расположенную между каналами. Горячий
теплоноситель отдает свою тепловую энергию пластине, а та, в свою очередь-
холодному теплоносителю. Также каждый из каналов характеризуется массой находящегося в нем теплоносителя. Задачей
регулирования является установление температуры нагретого теплоносителя в
заданное значение.
В последнее время распространение стали получать системы управления, основанные на
нечеткой логике (т.н. fuzzy-логика).
Нечеткие регуляторы(fuzzy-регуляторы), построенные
на основе нечетких множеств и нечеткой логики,
зачастую способны обеспечить более высокие показатели качества
переходных процессов по сравнению с традиционными регуляторами . Благодаря
применению нечетких регуляторов
возможно осуществлять регулирование
объектами без проведения всесторонних исследований по разработке классических математических моделей.
В представленной работе проведено сравнение результатов работы нечеткого регулятора с использованием модели
Мамдани и классического ПИД-регулятора.
Исходя из классической теории автоматического
управления для данного объекта был разработан ПИД-регулятор со следующими
параметрами настройки: К=
0,17, Ti=150, Td=6, которые были
рассчитаны по методу реакции на входное
воздействие и дают наилучший переходный процесс.
В результате
моделирования системы с ПИД-регулятором был получен переходный процесс :
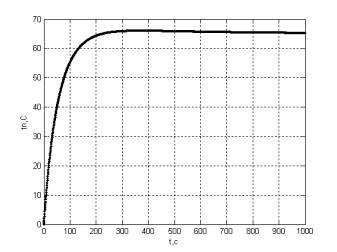
Рис.2- Зависимость температуры нагретой воды в системе с
ПИД-регулятором(tзад=65![]() )
)
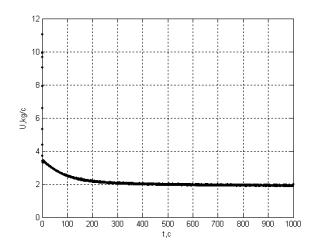
Рис.3-
Управляющее воздействие в системе с ПИД- регулятором
Для построения нечеткого регулятора были разработаны
функции принадлежности для входной и
выходной переменных регулятора, изображенные на рис. 4 и 5. Входная переменная имеет
6 терм, неравномерно расположенных по
оси возможных входных значений, выходная
переменная имеет также 6 терм ,с еше более неравномерным расположением
по оси значений. Все функции принадлежности имеют треугольную форму (тип trimf в пакете Matlab)
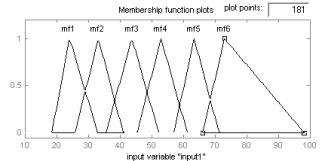
Рис.4 – Функции
принадлежности входной переменной регулятора(уставка температуры)
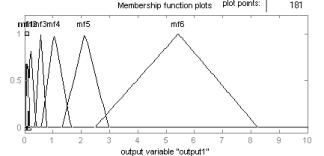
Рис.5- Функции принадлежности выходной
переменной регулятора(расход горячего теплоносителя)
В результате
моделирования системы с нечетким регулятором был получен переходный процесс:
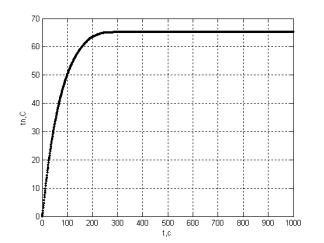
Рис.6- Зависимость температуры нагретой воды в системе с fuzzy-регулятором
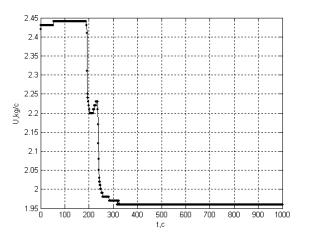
Рис.7- Управляющее
воздействие в системе с fuzzy- регулятором
Анализ рис.2-3 и 6-7
показывает, что для
системы с fuzzy-регулятором время установления
меньше ,к тому же отсутствует перерегулирование. Перерегулирование при
управлении является крайне нежелательным для данных объектов по той причине,
что это способствует износу конструкции в результате колебаний температуры .
Что касается
управляющего воздействия,то оно в системе с нечетким регулятором не имеет
резких выбросов или скачков на всем своём диапазоне, что тоже следует отнести к
плюсам данного метода регулирования. В то же время управляющее воздействие у
ПИД-регулятора имеет значительный скачок в начале .Это свидетельствует о том,
что в данном случае нечеткое регулирование является более экономичным, так как
обеспечивает меньший расход горячего теплоносителя.
Выводы: Классическое
регулирование для объектов данного класса дает вполне удовлетворительные
результаты, однако нечеткое регулирование обеспечивает чуть более качественные
характеристики управления, в особенности те ,которые имеют четко выраженный
прикладной характер. Следует ожидать, что сочетание или комбинирование
классического и нечеткого методов позволит получить еще более качественные
показатели. Литература
1.
Леоненков А. Ю. Нечеткое моделирование в среде
Matlab и fuzzyTech. - С. - Птб.: БХВ, 2003. ─ 720 с.
2.
Золотухин Ю.Н., Кущ А.В. Вариант построения базы
правил для нечеткого контроллера./ ermak.cs.nstu.ru