Исмаилов
С.У., Сарибаев А.А., Мусабеков А.А., Ахылбеков Ш.А.
Южно-Казахстанский
Государственный Университет им. М. Ауэзова, г. Шымкент, Республика Казахстан
Определение реального
шага датчика угла гелиостата
Один из задач системы автоматического слежения
гелиостата заключается в том, что оптоэлектронный датчик (ОЭД), определяющий
угловое положение зеркальной концентрирующей системы (ЗКС) относительно оси
вращения, при нормальной эксплуатации системы, должен с наибольшей точностью
отслеживать заданный от ПК угол поворота. Для этого необходима обратная связь.
В систему, кроме объекта регулирования и устройств управления, должны входить
измерительные устройства, с помощью которых производится измерение управляющих
сигналов, позволяющих создать замкнутую динамическую систему. Отслеживание угла
поворота оси вращения, сравнение программного угла поворота оси вращения с её
действительным углом поворота, входит в задачу ОЭД и автоматизированной системы
управления гелиостатом (АСУГ) [1]. Также необходимо решать задачу определения
направления вращения, что и было реализовано нами с помощью ОЭД датчика в виде
двух оптоэлектронных пар.
При этом, учитывая значительную инерционность
гелиостата, действие ветровых нагрузок в системе автоматического управления ЗКС,
также необходимо определение динамики переходных процессов, т.е. динамики
изменения угла рассогласования Dj между входными и
выходными сигналами в системе. Для этого на первом этапе мы определяли
характеристики самой ОЭД – её угловой шаг в диапазоне углов поворота ЗКС,
влияние на шаг погрешностей редукторов и определение возможности ОЭД как
измерительного устройства отсчета углов поворота. При этом особое значение
имеет вопрос о начале трогания (вращения) ЗКС, которая в принципе является
одной из основных составляющих точности слежения и определяющих амплитуду
рассогласования или фактически амплитуду изменения точности ориентации.
Проблема заключалось в том, что вследствие
трения в редукторах и на выходной оси появляются упругие деформации в
механических элементах (на выходных шестернях и на оси вращения), вследствие
чего начало трогания может запаздывать [2]. А сама ЗКС при подаче импульса
может отработать его не полностью. Эта гипотеза динамики трогания будет иметь
место и при слежении с помощью оптического датчика и будет существенно зависеть
от величины зоны нечувствительности. Для оценки запаздывания были проведены
экспериментальные исследования по определению характера "трогания" в
процессе отработки управляющих импульсов имитирующих в принципе реальную
динамику в режиме программного управления (рисунок 1).
Как видно из рисунка 1, действительно имеются
колебания угла отработки. Эти отклонения составляют относительно задаваемого
шага импульса 36.68 угл.сек. Эти отклонения обусловлены упругими деформациями.
Из рисунка 1 следует, что после каждого
отставания имеет место практически такое же опережение, причем отклонения
практически сохраняются на протяжении всех 100 импульсов. Можно сделать вывод,
что в принципе эта ошибка не накапливается, и будет характеризовать именно
амплитуду точности наведения.
Далее были проведены исследования по динамике
изменения реального шага датчика угла, оценка точности, как датчика угла, так и
влияния на шаг неточностей пар редуктора от ОЭД до оси вращения. В режиме
управления гелиостата от ПК текущее угловое положение гелиостата
контролировалось независимо автоколлимационным методом с помощью теодолита
марки 2Т2М и плоского зеркала закрепленного в центре гелиостата [3].
В программе управления ПК задавался некоторый
угол поворота, который передавался усилителю исполнительного механизма и
гелиостат начинал вращаться. При этом действительный угол поворота определялся
теодолитом. Этот угол также измеряется датчиком ОЭД.
Рисунок 1 - Динамика отработки управляющих импульсов (углы
поворота ЗКС для одного импульса) в режиме программного движения.
При этом, зная общее число шагов на ОЭД -
импульсов (они фиксируются счетчиком ОЭД, расположенным конструктивно в ПК),
зная число импульсов и действительный угол поворота, определяем угловой шаг
датчика угла ОЭД. Результаты измерений шага датчика ОЭД для различных угловых
положений осей вращения приведены на рисунке 2 а, б.
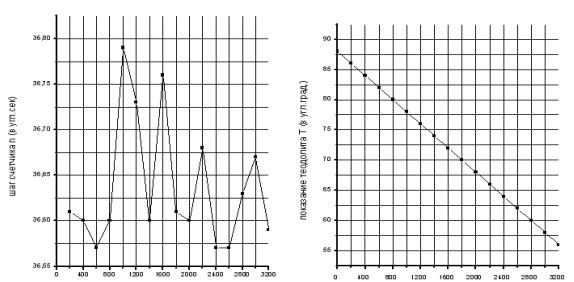
Рисунок 2а - Шаги зенитального датчика ОЭД в диапазоне углов
вращения зенитальной оси гелиостата от 0 до 350
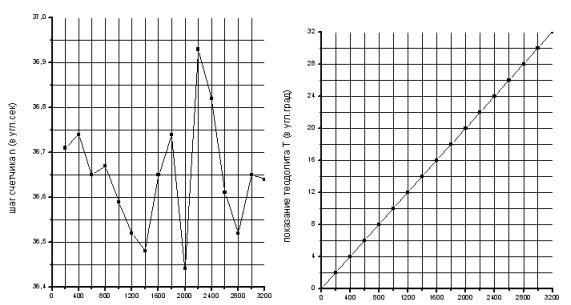
Рисунок 2б - Шаги азимутального датчика ОЭД в диапазоне
углов вращения азимутальной оси гелиостата относительно меридиана от 0 до 350
Как видно отклонения шага по обеим осям во всем
диапазоне углов поворота не превышают ± 0.3 угл. сек. Так как
эти отклонения достаточно случайны, то они не должны приводить к накоплению
погрешностей передачи угла датчиками ОЭД. Подтверждением этому является то, что
полные углы поворота по теодолиту и по датчикам практически совпадают.
Проведенные исследования позволили определить не только реальные шаги датчика
ОЭД с учетом погрешностей в редукторе, но и подтвердили возможность отсчета и
обеспечения обратной связи по реальному углу поворота гелиостата с помощью ОЭД.
Литература:
1. Weizmann institute solar research facilities //Energy Rept. -1989. – Vol. 16, №5. С.6.
2. R. Walraven. Calculating the position of the sun. //Solar Energy. -
1978. – №20. - Р.393-397
3. Исмаилов С.У., Мусабеков А.А., Исследование задачи управления ориентацией
солнечных ЗКС //«Вестник КазАТК», 2013 - № 3. С 49-54.