Давыдов А.А.,
Макенов А.А.
Республика
Казахстан, г. Усть-Каменогорск,
Восточно-Казахстанский
государственный технический университет
им. Д.
Серикбаева
ПУТИ ПОВЫШЕНИЯ
ПЛАВНОСТИ ХОДА АВТОТРАНСПОРТНЫХ СРЕДСТВ
Кузов
транспортного средства имеет шесть
степеней свободы и может соответственно совершать шесть различных
типов колебаний, такие как линейные
перемещения вдоль осей X; Y; Z и угловые перемещения
вокруг осей X; Y и Z (рис.1).
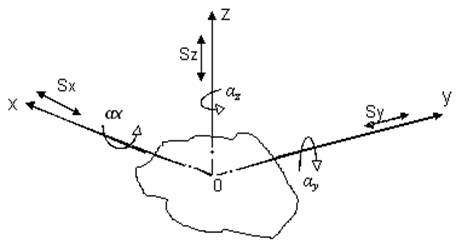
Рисунок 1 – Схема колебательной
системы транспортного средства
Линейные перемещения
вдоль оси X обозначаются Sx и
называются подергиванием,
перемещения вдоль оси Y обозначаются Sy и называются шатанием,
а линейные перемещения
вдоль оси Z обозначаются Sz и
называются подпрыгиванием.
Угловые перемещения
вокруг оси X обозначаются αх и называются
покачиванием. Угловые перемещения вокруг оси Y обозначаются αy и называются галопированием, а
угловые перемещения вокруг оси Z
обозначаются αz и
называются вилянием.
Из-за сложности
исследования системы с
шестью степенями свободы
при расчете подвески обычно изучают
только два вида
колебаний кузова транспортного средства, то есть рассматривают транспортное средство как сис-тему с
двумя степенями свободы: линейные колебания
вдоль оси Z и угловые колебания
вокруг оси Y. Отмеченные
типы колебаний имеют
первостепенное значение для
комфортабельности транспортного
средства, так как
именно они вызывают у водителя и пассажиров наиболее болезненные ощущения.
Все это обусловлено большой амплитудой
и плохо переносимой
нап-равленностью, что, в конечном
счете, вызывает повышенную утомляемость и существенно влияет на
безопасность дорожного движения.
Наиболее пагубное влияние при этом оказывает галопирование.
Чтобы иметь
представление о том,
каким образом можно
уменьшить колебания транспортного
средства вокруг оси Y, необходимо иметь представление о
центре упругости системы. Центром
упругости системы называют точку, при приложении к которой внешней возмущающей
силы возникают только линейные перемещения системы.
Для того чтобы определить положение центра упругости,
рассмотрим стержень, который опирается на упругие элементы подвески (рис.2).
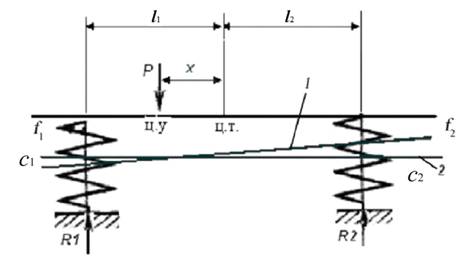
Рисунок 2 –
Схема для определения положения центра упругости системы
Если возмущающая
сила Р приложена не
к центру упругости (Ц.У.), а в другой точке, то
возникают линейные и угловые перемещения (положение стержня 1, рис. 2). Если же сила Р приложена к центру
упругости системы, то происходит
только линейное перемещение (положение стержня 2, рис. 2). В последнем
случае деформация упругого
элемента f1=f2 , вследствие чего галопирование
отсутствует.
Определим величину х -
расстояние от центра тяжести до её
центра упругости. Из условия
равновесия стержня относительно
центра тяжести имеем [1]:
R1*l1-P*x-R2*l2 = 0, (1)
где
R1 и R2- реакции опор.
Решим данное уравнение
относительно х = (R1*l1-R2*l2)/
Р. (2)
Заменим реакции
опор R1=с1*f1 и R2=с2*f2, тогда
Р = R1+ R2= с1*f1 + с2*f2,
где
с1 и с2 – жесткости упругого
элемента.
Подставив
в уравнение (2) найденные
значения R1, R2 и Р, получим
х = (с1*f1* l1- с2*f2* l2 )/ (с1*f1 + с2*f2).
При отсутствии галопирования
f1= f2, следовательно
х = (с1*
l1- с2* l2 )/
(с1 + с2).
Если расстояние
от центра тяжести
системы до её
центра упругости равно нулю, то есть плечо х = 0 (центр тяжести (Ц.Т.)
совпадает с центром упругости), то х = (с1*
l1- с2* l2 )/ (с1 + с2)=0.
Тогда с1* l1=
с2* l2 или
с1/ с2= l2/ l1 .
(3)
С другой стороны
расстояния l1 и l2
можно выразить через вес транспортного средства, распределяющийся на
переднюю ось G1 и заднюю ось G2 , и его базу L
l1 = (G2*L/ G), а l2 = (G1*L/ G).
С учетом этого уравнение (3) запишем
в следующем виде
с1/ с2 = G1/ G2 . (4)
Следовательно, жесткости подвесок необходимо выбирать таким
образом, чтобы они были обратно
пропорциональны расстояниям от центра тяжести
до передней и
задней осей транспортного средства или прямо пропорциональны
его весу, приходящемуся на переднюю и
заднюю оси. Тогда при одинаковых прогибах
передней и задней
подвесок (f1 и f2) кузов транспортного средства будет
перемещаться вертикально без галопирования.
В
качестве примера нами была проведена проверка упругих элементов подвески автомобиля ВАЗ-2121 «Нива» на
соответствие их характеристик условиям (3, 4).
Анализ результатов
расчета параметров позволяет сделать вывод, что
жесткости упругих элементов
подвески не обеспечивают автомобилю ВАЗ-2121 «Нива» достаточной
плавности хода при минимальной и максимальной загрузке (табл.1).
Таблица
1 – Соотношение жесткости подвески и веса автомобиля
|
Отношение весов
автомобиля G1/ G2 |
Отношение жесткостей упругих
элементов подвески
с1/ с2 |
|
|
при
минимальной нагрузке |
при максимальной нагрузке |
|
|
1,45 |
0,94 |
2,8 |
Далее
нами был произведен расчет с целью исключения угловых перемещений вокруг оси Y на примере упругого элемента
(пружины) автомобиля ВАЗ-2121 (табл. 2, рис. 3).
Таблица 2 – Исходные
данные
|
Пружина |
dn |
n |
Dср |
|
передняя |
0,0148 |
7 |
0,1052 |
|
задняя |
0,013 |
9 |
0,1152 |
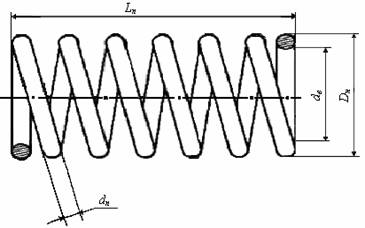
Dн – внешний диаметр витка, м; dв –
внутренний диаметр витка, м;
dп – диаметр проволоки, м; L –
длина проволоки, м
Рисунок 3 –
Основные параметры пружины
При расчете жесткости пружины используем формулу [2]
 ,
,
где
G
– модуль сдвига (для стали G =8…9*104 МПа);
n
– количество рабочих витков пружины;
Dв
– средний диаметр витка, м.
Расчет жесткости передней
пружины
 н/м.
н/м.
Расчет жесткости
задней пружины
 н/м.
н/м.
Вес
автомобиля, приходящийся на передние
пружины, G1=750 кг, вес автомобиля, приходящийся на задние пружины, G2=800 кг.
Соотношение
параметров жесткости и веса в пропорции:
 .
.
Таким
образом, условие (4), при котором исключается галопирование, в данном случае не
соблюдается.
Чтобы
получить оптимально возможную плавность хода, т.е. обеспечить условие уравнения
(4), необходимо изменить параметры упругих элементов, которые определяют
жесткости последних. В данном случае упругими элементами являются пружины,
жесткость которых зависит от нескольких параметров (диаметр проволоки, средний
диаметр витка, количество витков и материал, из которого изготовлены пружины).
Решить поставленную задачу, изменяя только один из перечисленных параметров
упругого элемента подвески, практически невозможно. Наиболее приемлемым является
вариант решения, при котором изменяются два параметра, а именно диаметр
проволоки пружины и количество ее витков. Например, при использовании упругих
элементов передней подвески с количеством витков n1 = 10 и диаметром проволоки dn1 = 0,0135 м, а
задней n2 = 10 и dn2 = 0,0148 м, их жесткости будут равны c1 = 2,9*104 н/м и c2 = 3,1*104 н/м соответственно, что удовлетворяет условию
(4).
Поэтому
упругая характеристика витой цилиндрической пружины является линейной, а
изменение соотношения весов автомобиля G1 /G2 при различной степени загрузки
последней не соответствует уравнению y = k*x. Следовательно, при выборе
параметров упругих элементов подвески необходимо учитывать условия эксплуатации
автомобиля [3].
Нами была разработана
программа, позволяющая решать подобные задачи для автомобилей различных марок,
обладающих подвесками, упругими элементами которых являются витые
цилиндрические пружины [4,
5].
Программа расчета параметров подвески была создана нами с целью расчета необходимой жесткости передней и задней пружины на примере автомобиля ВАЗ-2121. При изменении количества витков в ячейке n мы получим конкретное значение необходимой жесткости пружины, аналогично при изменении диаметра проволоки dп получим также значение необходимой жесткости пружины.
В
дальнейшем программа нами совершенствуется с целью применения ее для расчета
упругих элементов других типов, которые устанавливаются на современных
транспортных средствах. Выбор одного из упругих элементов позволит ознакомиться
с его схематическим изображением и с
основными расчетными формулами.
Литература
1
Литвинов А.С., Фаробин Я.Е. Автомобиль:
Теория эксплуатационных свойств. – М.: Машиностроение, 1989. – 237 с.
2
Осепчугов В.В., Фрумкин А.К. Автомобиль: Анализ конструкций, элементы расчета. – М.: Машиностроение, 1989. – 304 с.
3 Давыдов А.А., Макенов А.А., Саденов Е.К. Повышение
плавности хода автомобиля// Вестник ВКГТУ. – 2005. – № 3. – С. 49-54.
4
Макенов А.А., Давыдов А.А. Автоматизированный расчет показателей плавности хода
автомобиля// Математическое
моделирование и информационные технологии в образовании и науке: Матер. III Междунар. науч. - метод. конф., 29 сент.-2 окт. 2005 г. – II том. – Алматы: КазНПУ им. Абая,
2005. – С. 17-21.
5
Макенов А.А., Давыдов А.А. Использование ЭВМ для расчета показателей плавности
хода автомобиля// Новые
информационные технологии в образовании: Матер. Междунар. науч. - практ. конф.,
26-28 февраля 2007 г./ Ч. I. – Екатеринбург: РГППУ, 2007. – С. 88-91.