ТЕХНИЧЕСКИЕ НАУКИ 11.РОБОТОТЕХНИКА
К.т.н Буянкин В.М.
Московский государственный технический
университет им. Н.Э.Баумана
Нейроуправление группой электроприводов секции робота-манипулятора “Хобот”
Аннотация.
Данная работа
посвящена разработке и исследованию эффективности нейросетевых систем
управления электроприводами
манипулятора робота типа «Хобот». При этом решаются задачи определения
оптимальной геометрии такого робота и оптимальной траектории его движения.
Для
уменьшения контурной ошибки повышения точности и быстродействия
работы манипулятора предлагается нейроадаптивная нейроинвариантная система управления электроприводами.
Помимо
нейрорегуляторов в контурах
управления электродвигателями для снижения ошибки между заданным желаемым и
реальным движением для отработки необходимого
перемещения по контуру предлагается использование нейроинвариантного
управления. При выполнении условий инвариантности нейрорегуляторы обеспечивают подачу в контур управления
электроприводом производные от
задающего сигнала, поступающего из системы управления.
Использование нейрорегуляторов для систем управления электроприводами позволяет обеспечить оптимальные желаемые характеристики работы манипулятора робота типа “Хобот”.
1.
Введение.
Современные манипуляторы, как правило, представляют собой
разомкнутые кинематические цепи, состоящие из подвижно соединенных звеньев.
Обычно эти звенья обладают одной степенью свободы, т.е. образуют поступательные
или вращательные кинематические пары. В настоящее время широкое применение
нашли механизмы с параллельной
кинематикой. Механизмы с параллельной кинематикой требуют использования
непрямоугольного (нелинейного) базиса, что порождает возможность потери управляемости в некоторых конфигурациях манипулятора;
сложность задания движений манипулятора в обобщенных координатах, связанных со
степенями подвижности манипулятора. Поэтому как следствие, управление
роботами-манипуляторами параллельной кинематики существенно сложнее управления
традиционными роботами-манипуляторами. Все это приводит к решению задач
разработки новых неклассических методов управления такими механизмами, в
частности, нейролсетевых методов управления.
2.Метод решения проблемы.
На рис.1
изображены разные положения робота манипулятора типа Хобот при перемещении из
положения А в Б. Из-за недостаточной
жесткости многозвенных секций, трения в исполнительных механизмах и
неоптимальной настройки электроприводов реальная траектория перемещения центра масс (Ц.М.) секции
робота-манипулятора из положения А в положение Б может существенно отличаться
от заданной траектории [1]. Это
приводит к снижению статической и динамической
точности работы робота-манипулятора рис. 2, и ограничению его
технологических возможностей.
В процессе
работы робота- манипулятора требуется
получить заданную программой траекторию. Опишем заданную
траекторию движения в координатах XYZ в
следующей форме:
![]() , (1)
, (1)
где ![]() - радиус вектор.
- радиус вектор.
Траектория,
воспроизведенная робота- манипулятора имеет вид:
![]() .
(2)
.
(2)
Полученная траектория удовлетворяет
требованием точности, если выполняется неравенство:
![]()
![]() ]
]![]()
![]() , (3)
, (3)
где ![]() - максимальная траекторная ошибка.
- максимальная траекторная ошибка.
Требование к точности воспроизведения
будем оценивать максимальной контурной ошибкой воспроизведения ![]() , которая представляет собой геометрическую сумму ошибок по
отдельным осям координат
, которая представляет собой геометрическую сумму ошибок по
отдельным осям координат ![]() .
.
При перемещении во времени траектория секции робота-
манипулятора может быть представлена в
виде следующего выражения:
![]() (4)
(4)
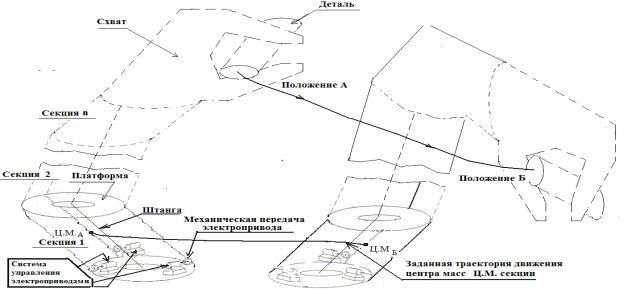
Рис. 1. Перемещение робота манипулятора типа “Хобот”
из положения А
в положение Б
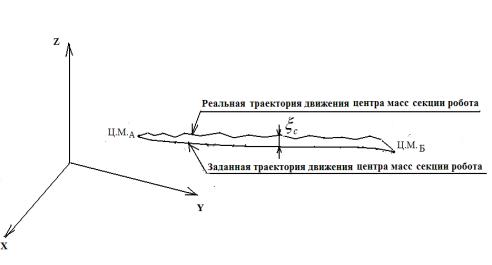
Рис. 2. Заданная и реальная траектория движения Ц.М.
секции робота
Для
уменьшения контурной ошибки ![]() , повышения точности
и быстродействия работы
манипулятора предлагается нейроадаптивная нейроинвариантная система
управления электроприводами рис. 3.
, повышения точности
и быстродействия работы
манипулятора предлагается нейроадаптивная нейроинвариантная система
управления электроприводами рис. 3.
Помимо нейрорегуляторов [3] в контурах
управления электродвигателями для снижения ошибки между заданным желаемым и
реальным движением для отработки необходимого
перемещения по контуру предлагается использование инвариантного
управления с
нейрорегулятором рис. 4.
При выполнении условий инвариантности [2] нейрорегулятор должен
обеспечить подачу в контур управления электроприводом как можно больше производных от задающего сигнала,
поступающего из системы управления манипулятором [4],[5].
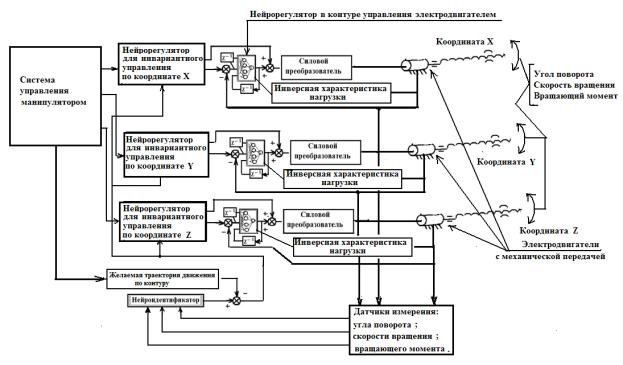
Рис. 3. Нейроадаптивная нейроинвариантная система управления электроприводами
Уравнения работы нейрорегулятора имеют вид:
![]() ,
, ![]() ;
;
![]()
![]()
( 5)
где
![]() - входной и выходной сигнал
нейрорегулятора;
- входной и выходной сигнал
нейрорегулятора;
![]() ,
, ![]() - входные сигналы нейрорегулятора,
задержанные на один, два такта;
- входные сигналы нейрорегулятора,
задержанные на один, два такта; ![]() - выходные сигналы первого слоя нейронов;
- выходные сигналы первого слоя нейронов; ![]() - веса первого слоя нейронов;
- веса первого слоя нейронов; ![]() - сигналы на выходе блоков активации первого слоя нейронов;
- сигналы на выходе блоков активации первого слоя нейронов; ![]() - сигнал на выходе второго слоя нейро нов;
- сигнал на выходе второго слоя нейро нов; ![]() - веса второго слоя нейронов;
- веса второго слоя нейронов; ![]() - линейная функция активации.
- линейная функция активации.
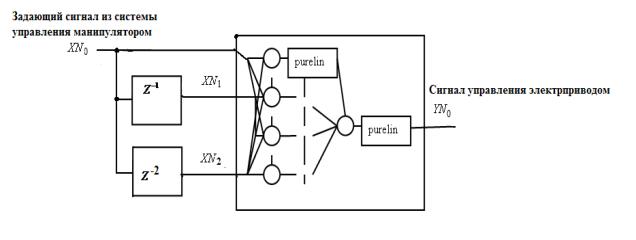
Рис. 4. Структурная схема
нейрорегулятора
Литература
1. Буянкин В.М. Нейронные сети в управлении. Издание LAMBERN Academic Publishing Germany, 2011г 300 с.
2.
Буянкин В.М., Каганов Ю.Т.
Нейроуправление роботами с параллельной кинематикой Издание LAMBERN Academic
Publishing Germany, 2011г 165с.
3. Буянкин В.М. Интегральный, пропорциональный,
дифференциальный нейрорегулятор. Вестник МГТУ им. Н.Э.Баумана, Сер. “
Естественные науки” 2006. №3 с. 56-61
4. Буянкин В.М.
Применение искусственной нейронной сети в режиме идентификации
динамических параметров электродвигателя.
Вестник МГТУ им. Н.Э.Баумана, Сер. “Приборостроение” 2006. №3 с.25-30
5. Буянкин В.М. Двухконтурная система нейроуправления
электроприводом с нейросамонастройкой.
Нейрокомпьютеры разработка и применение 2006 г.№8-9 с.90-94