Алюков
А.С.
Южно-Уральский
государственный университет, Челябинск, Россия
Моделирование динамики
колесной платформы
в компьютерной среде Matlab/Simulink
Новое поколение робототехнических систем
характеризуется повышенной мобильностью, активным взаимодействием с внешней
средой, расширенными способностями приспособления к сложному, неопределенному и
подвижному окружению. Высокие качественные характеристики и подвижность так
называемых активных роботов используется для выполнения целого ряда
нетривиальных операций, таких как обход препятствий, проникновение в
труднодоступные зоны, выбор удачного подхода к внешним объектам и прецизионное
движение по сложным криволинейным трассам с сохранением требуемой ориентации в
пространству [1-3]. Мобильность активных роботов, приспосабливаемость к внешней
среде и сравнительная автономность делает их использование весьма
привлекательным для самых разнообразных сфер человеческой деятельность, включая
автоматизированное производство, космос и подводные исследования, оборону,
медицину и т.д.
Рассматриваемая колесная платформа имеет два
ведущих колеса. Ведомые (пассивные) колеса можно исключить из рассмотрения.
Схема платформы с принятыми обозначениями изображена на рис.1.
Здесь:
x, y – абсолютная земная
система координат;
X,Y – связанная система
координат;
![]() геометрический центр
платформы с координатами (
геометрический центр
платформы с координатами (![]() ;
;
![]() центр масс платформы
с коориднатами
центр масс платформы
с коориднатами ![]()
![]() референтная точка
платформы с координатами
референтная точка
платформы с координатами ![]() ;
;
b – расстояние от ведущего колеса до оси
симметрии;
r – радиус ведущих колес;
![]() масса платформы без
учета массы ведущих колес;
масса платформы без
учета массы ведущих колес;
![]() масса каждого
ведущего колеса;
масса каждого
ведущего колеса;
![]() момент инерции
платформы без учета ведущих колес относительно вертикальной оси, проходящей
через центр масс;
момент инерции
платформы без учета ведущих колес относительно вертикальной оси, проходящей
через центр масс;
![]() момент инерции
каждого ведущего колеса относительно оси колес;
момент инерции
каждого ведущего колеса относительно оси колес;
![]() момент инерции
каждого ведущего колеса относительно диаметра колеса;
момент инерции
каждого ведущего колеса относительно диаметра колеса;
a – длина платформы;
d – расстояние по оси X от точки ![]() до точки
до точки ![]() .
.
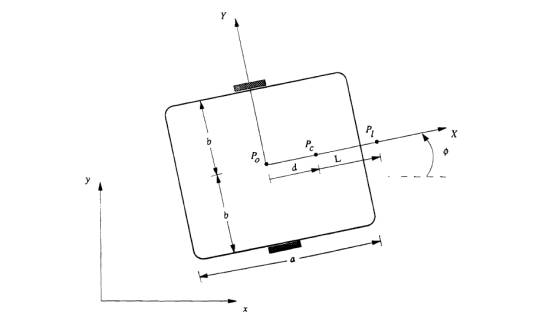
Рис.1. Схема колесной платформы
Разработка и анализ регуляторов для модели в
пространстве состояний изучена и описана во многих литературных источниках. Для
записи уравнения состояния необходимо определиться с выбором вектора состояния
– вектора, элементами которого являются переменные состояния. Для
рассматриваемой системы можно записать вектор состояния как ![]()
Используя данные переменные состояния,
уравнение движения платформы можно записать так
 (1)
(1)
где
![]() .
.
Система уравнений состояния (1), описывающая
движение колесной платформы, была смоделирована в среде Matlab/Simulink.
Модель платформы в Simulink представляет собой блок
Dynamics. Вид данного блока приведен на рис.2.
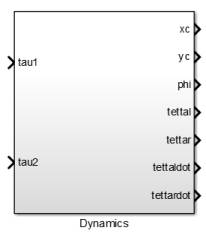
Рис.2.
Модель колесной платформы в Simulink
Блок
имеет два входа – tau1 и tau2. Данные входы –
моменты, создаваемые электродвигателями на левом и правом ведущем колесе
соответственно. Выходами блока являются
7 переменных состояния. Структура блока приведена в Приложении таком-то.
Вычисление значений матриц S, M, V, E
реализовано с использованием m-функций. На вход блоков
подаются аргументы, необходимые для вычисления значений матрицы. Выходом каждой
функции является блок Goto с соответствующим
именем. Вид данных блоков в среде Simulink представлен на рис.3.
В данной
работе нелинейная динамическая система в итоге приводится к так называемому
цепному квазиканоническому виду. Для этого, предварительно, необходимо получить
аффинную систему уравнений:
![]() (2)
(2)
 (3)
(3)
Система
«вход-состояние-выход» вида (2), (3)
называется аффинной или линейной по управлению. Таким образом, возникает задача
привести математическую модель объекта к виду (2) и выбрать уравнения выхода
(3).
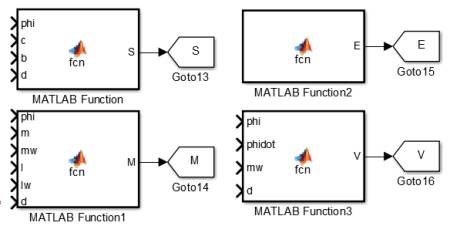
Рис.3. Функции для
вычисления матриц S, M, E, V
Если для системы (1) в качестве управляющего
воздействия τ выбрать
![]() (4)
(4)
где символ + обозначает
псевдоинверсию, уравнение (1) приводится к виду (2). Здесь ![]()
Выражение (4) может упрощаться в конкретных случаях. Для
рассматриваемой конструкции двухколесной платформы выражение принимает вид
![]()
Литература:
1. Бурдаков С.Ф., Мирошник
И.В., Стельмаков Р.Э. Системы управления движением колесных роботов. – СПб.:
Наука, 2001. – 229 с.
2. Алюков А.С.
Совершенствование конструкции динамически стабилизируемых робототехнических
систем на основе сферического колеса. Материалы VIII Международной
научно-практической конференции "Образование и наука в XXI
веке". – Том 48. Технологии. – София, Болгария: "Бял ГРАД-БГ"
ООД. – 2012. – С. 64-67.
3.
Nilanjan Sarka, Xiaoping Yun, R.
Vijay Kumar. Control of Mechanical System with Rolling Constraints: Application
To Dynamic Control of Mobile Robots. – University of Pennsylvania,1992. – 28 p.