Кайнарбеков А.К., Танирбергенов
А.К.
Гуманитарный университет
транспорта и права им. Д.А.Кунаева,
г Алматы, Республика Казахстан
ШАГАЮЩЕЕ
КОЛЕСО «СКОЛЬЗЯЩИЙ КАБЛУК»
Второе предложение также направлено на то, чтобы добиться плавности хода и
устранения ударного приземления спиц шагающего колеса, не прибегая к усложнению
его конструкции. Смысл идеи заключается в следующем: падение спицы колеса
спустить по наклонной плоскости, путем установки на пятку каблука, скользящего
вдоль спицы.
Возникла необходимость теоретического анализа
работы этого колеса.
Были построены в масштабе схема колеса и
повернутого на небольшой угол φ1 положение
спицы 2. На чертеже повернутое
положение колеса показано тонкими линиями (рис. 1а и 1в).
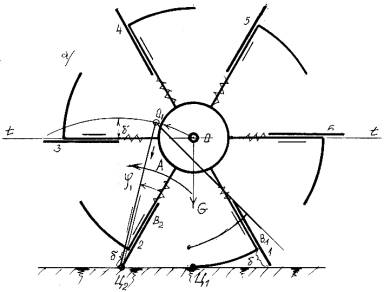
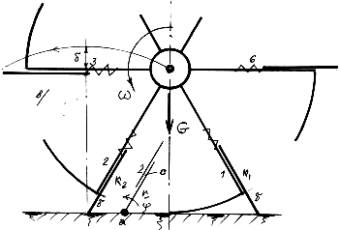
Рисунок 1. Шагающее
колесо на скользящем каблуке
Это предложение требует проверки, но есть
надежда на успех его осуществления.
Был изготовлен макет предлагаемого шагающего
колеса (рисунок 2а и рис. 2б), который показал хорошие результаты:
достигнута плавность хода и устранено ударное приземление наступающей на
поверхность дороги спицы.

Рисунок 1
Это было видно визуально как на макете, так и на
построенных схемах положений колеса. Следовательно, при переходе центра масс на
другую спицу колесо остается на одной опоре Ц2. Тогда спица 2 (рисунок 1в), удерживая вес колеса G,
падает вдоль своего каблука как бы по наклонной плоскости. В этот момент
механизм спицы обладает двумя степенями подвижности:
W=3n – 2p1 = 3∙2 – 2∙2 = 2,
где
n=2
– число подвижных звеньев (ступица 2
с корпусом и каблук К),
р1=2 – число кинематических пар 5
класса (одноподвижные шарниры а и с).
Эти схемы
показали, что переход центра масс к наступающей спице 2 происходит мгновенно, так как при повороте даже на малый угол
φ1 с опоры отрывается задняя спица 1.
Одной подвижностью управляет привод колеса, а
другой управляет проекция силы веса. Это означает, что перемещение ступицы
колеса не однозначно зависит от угла поворота спиц φ1. Спуск
колеса по наклонному скользящему каблуку зависит не только от φ1, но
и от других факторов. Время спуска зависит от величины значения силы веса G, а также от
коэффициента силы трения fс между материалами спицы и каблука. Становится
ясным, что в данном случае не может быть достигнута прямолинейность траектории
центра ступицы О колеса.

Рисунок 2б
После этого анализа можно утверждать, что для
выполнения требования о плавности хода
шагающего колеса необходимо, чтобы в процессе выполнения одного шага колеса
перевод центра тяжести происходил стоя
на двух спицах. При этом указанный процесс шагания осуществляется на двух
скользящих каблуках (впредь будем называть их штангами).
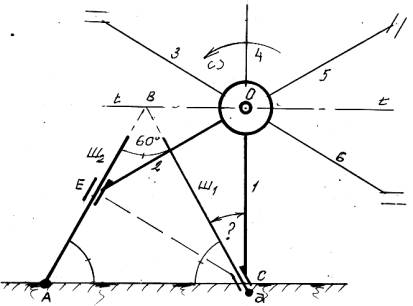
Рисунок 3. К синтезу
схемы ШК «скользящий каблук»
Теперь надо точно определить угол наклона штанг
к направлению спиц и убрать ступни спиц колеса (рисунок 3). Учтем, что две
смежные спицы образуют механизм, степень подвижности которого равна
W=3n – 2p1 = 3∙3 – 2∙4 = 1,
где
n=3
– (штанги Щ1 и Щ2 и корпус ступицы), р1=4 – (две опорные точки штанг А и а
и направляющие Е и С корпуса ступицы, скользящие вдоль штанг).
Это значит положение центра ступицы О при перекатывании зависит только от
угла поворота спиц.
ЛИТЕРАТУРА
1.
Муратов А. М., Кайнарбеков А. К., Сазанбаева Р. И.,
Антонова Ж.Ж. Синтез схемы шагающего колеса. - Алматы: 2007г.
2.
Муратов А. М., Сазанбаева Р.И., Мусин Т.О. Синтез строения замкнутых
кинематических цепей без избыточной связи. // Вестник. КазАТК., №5, 2001г.
3.
Муратов А.М., Кайнарбеков А.К. Синтез схемы исполнительного
механизма 4-го класса.// «Промышленный транспорт Казахстана» -. Алматы: КУПС, №
5, 2007г.
4.
Муратов А. М. Докторская диссертация. «Синтез многофункциональных
механизмов высоких классов» - Алма-Ата:
1986г. С.230.