Современные информационные
технологии/1. Компьютерная инженерия
Д-р техн.
наук, профессор И. И. Левин, канд. техн. наук Ю. И. Доронченко,
канд. техн.
наук А. К. Мельников
Научно-исследовательский институт многопроцессорных вычислительных систем
имени академика А. В. Каляева Южного федерального университета, Таганрог
Эффективная реализация алгоритмов
с глубокими циклами на реконфигурируемых вычислительных системах*
Введение
В настоящее время вычислительно трудоемкие
задачи в реальных постановках невозможно использовать без распараллеливания в
широком смысле этого слова вычислительных процессов.
При аппаратной реализации различных задач,
функций, узлов используются циклы в качестве конструкций, обеспечивающих
инкремент или декремент переменных для формирования адресов памяти, индексов,
битовых последовательностей и т.д. Подобные конструкции на реконфигурируемых
вычислительных системах (РВС) реализуются в счетчиках, сумматорах или блоках
памяти.
Зачастую число исполнений набора
инструкций в цикле достаточно велико и требуется организовывать глубокие циклы,
счетчик итераций которых достигает больших значений – 109 ... 1012
и более. Аппаратная реализация соответствующих устройств в синхронных и
конвейерных схемах может вызывать некоторые трудности, связанные с
эффективностью цепей переноса в старших разрядах на высокой тактовой частоте и
с затратами аппаратного ресурса.
Аппаратный ресурс, требуемый для
реализации того или иного конвейерного устройства, можно разделить на две
составляющие: аппаратные затраты на формирование непосредственно вычислительной
или управляющей структуры и аппаратные затраты на формирование системы
синхронизации. Решая сложные вычислительные задачи различных предметных
областей, разработчик сталкивается с необходимостью синхронизации большого
числа данных в конвейерах, что требует дополнительного аппаратного ресурса.
Например, для реконфигурируемых вычислителей на ПЛИС цепи синхронизации, выполненные
на триггерах, ввиду особенностей архитектуры ПЛИС одновременно поглощают
логические ячейки ПЛИС. В этой связи аппаратные затраты на систему
синхронизации соизмеримы с вычислительной структурой.
Для решения указанных выше трудностей
реализации предлагается способ, позволяющий снизить требования к топологии
устройства и сократить аппаратные затраты на синхронизацию. Для иллюстрации
способа рассмотрим пример информационного графа некоторого конвейерного
устройства.
Пусть задан конвейеризованный информационный
граф задачи ![]() , состоящий из
, состоящий из ![]() подграфов
подграфов ![]() ,
,
![]() ,
,
![]() ,
…,
,
…, ![]() ,
кортежной входной информационной вершины
,
кортежной входной информационной вершины ![]() (здесь и далее в угловых скобках обозначаем
кортежные вершины, за вертикальной чертой – число информационных вершин в
кортеже) и кортежной выходной информационной вершины
(здесь и далее в угловых скобках обозначаем
кортежные вершины, за вертикальной чертой – число информационных вершин в
кортеже) и кортежной выходной информационной вершины ![]() ,
причем между подграфами
,
причем между подграфами ![]() ,
,
![]() ,
существует такая информационная зависимость, при которой между вершинами
,
существует такая информационная зависимость, при которой между вершинами ![]() и
и ![]() существует дуга
существует дуга ![]() .
Кроме того, существуют дуги, соединяющие каждую входную вершину
.
Кроме того, существуют дуги, соединяющие каждую входную вершину ![]() со всеми подграфами
со всеми подграфами ![]() ,
,
![]() ,
,
![]() ,
…,
,
…, ![]() . На рис. 1 показан информационный граф
задачи. Для простоты рассуждений будем полагать, что других информационных
зависимостей не существует:
. На рис. 1 показан информационный граф
задачи. Для простоты рассуждений будем полагать, что других информационных
зависимостей не существует:
 ,
, ![]() ,
,
![]() ,
,

Рис. 1. Информационный граф задачи
Предположим, что в качестве входных
информационных вершин выступают формируемые счетчиком битовые
последовательности ![]() разрядности
разрядности ![]() .
Данную процедуру можно представить с помощью программной конструкции
.
Данную процедуру можно представить с помощью программной конструкции
for a(n) = 0 to m.
Пусть также для выполнения каждого
подграфа ![]() требуется
требуется ![]() тактов. В этом случае необходимо синхронизировать
потоки данных, следующие по дугам
тактов. В этом случае необходимо синхронизировать
потоки данных, следующие по дугам ![]() .
В каждой из этих дуг должны быть реализованы линии задержки глубиной
.
В каждой из этих дуг должны быть реализованы линии задержки глубиной ![]() тактов. Так как по всем дугам следуют
одинаковые потоки данных, то очевидно, что построение
тактов. Так как по всем дугам следуют
одинаковые потоки данных, то очевидно, что построение ![]() линий задержек нерационально. Необходимо
создание одной линии задержки глубиной
линий задержек нерационально. Необходимо
создание одной линии задержки глубиной ![]() тактов. Пример синхронизации данных в конвейере
показан на рис. 2. Заштрихованными прямоугольниками будем обозначать
синхронизирующие элементы (триггеры, регистры, память и т. п.).
тактов. Пример синхронизации данных в конвейере
показан на рис. 2. Заштрихованными прямоугольниками будем обозначать
синхронизирующие элементы (триггеры, регистры, память и т. п.).
Определим для простоты размер цикла
обработки значений последовательности ![]() (количество элементов кортежа) как
(количество элементов кортежа) как ![]() .
.

Рис. 2. Синхронизация данных в конвейере
При высокой разрядности для решения данной
задачи требуются большие временные и аппаратные затраты. Время решения задачи
можно оценить как
![]() ,
,
где τ – время следования операнда;
![]() – время
настройки вычислительной структуры.
– время
настройки вычислительной структуры.
Аппаратные затраты (число одноразрядных
элементов задержки на один временной отсчет) на построение линии задержки
определяются по формуле
![]() .
.
При обработке в цикле значений
последовательности ![]() ...
... ![]() изменение старших битов происходит крайне
редко, большинство времени значения битов постоянны. В этой связи предлагается
следующий способ сокращения аппаратных затрат на построение синхронизирующей
линии задержки.
изменение старших битов происходит крайне
редко, большинство времени значения битов постоянны. В этой связи предлагается
следующий способ сокращения аппаратных затрат на построение синхронизирующей
линии задержки.
Исходная последовательность ![]() разбивается на две последовательности
разбивается на две последовательности
 .
.
Последовательность ![]() – постоянная часть последовательности
– постоянная часть последовательности ![]() ,
а последовательность
,
а последовательность ![]() разрядности
разрядности ![]() – переменная часть последовательности
– переменная часть последовательности ![]() .
Задача решается в 2n−v (если граф не распараллелен) кадров. Под кадром будем
понимать выполнение задачи с текущей настройкой вычислительной структуры. В
каждом кадре структура вычислительной системы настраивается на обработку в
цикле значений переменной части
.
Задача решается в 2n−v (если граф не распараллелен) кадров. Под кадром будем
понимать выполнение задачи с текущей настройкой вычислительной структуры. В
каждом кадре структура вычислительной системы настраивается на обработку в
цикле значений переменной части ![]() при одной и той же постоянной части
при одной и той же постоянной части ![]() .
Пример выполнения кадра задачи представлен на рис. 3. Такая обработка может
быть представлена в виде вложенного цикла:
.
Пример выполнения кадра задачи представлен на рис. 3. Такая обработка может
быть представлена в виде вложенного цикла:
for ac(n − v) = 0 to 2n
− v;
for a(v) = 0 to
2v.
Последовательность ![]() по-прежнему может изменяться с помощью
счетчика,
по-прежнему может изменяться с помощью
счетчика, ![]() хранится в регистре. От кадра к кадру
постоянная часть изменяется. Таким образом, формируется последовательность
конвейеров, выполняющаяся на одном и том же аппаратном ресурсе. При
распараллеливании вычислений переменная часть остается общей для всех
параллельных конвейеров, а постоянная часть различна.
хранится в регистре. От кадра к кадру
постоянная часть изменяется. Таким образом, формируется последовательность
конвейеров, выполняющаяся на одном и том же аппаратном ресурсе. При
распараллеливании вычислений переменная часть остается общей для всех
параллельных конвейеров, а постоянная часть различна.
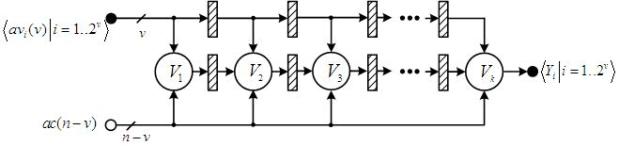
Рис. 3. Выполнение кадра задачи
В результате аппаратный ресурс ![]() ,
необходимый для построения линии задержки, сокращается на величину
,
необходимый для построения линии задержки, сокращается на величину ![]() :
:
![]() ;
;
![]() .
.
Для минимизации аппаратных затрат целесообразно
уменьшать разрядность переменной части ![]() ,
однако необходимо учитывать, что с ростом числа кадров задачи время на
настройку структуры (накладные расходы) увеличивается. Следовательно, и время
решения задачи увеличивается, причем если выбрана небольшая разрядность
переменной части, то это увеличение весьма существенно:
,
однако необходимо учитывать, что с ростом числа кадров задачи время на
настройку структуры (накладные расходы) увеличивается. Следовательно, и время
решения задачи увеличивается, причем если выбрана небольшая разрядность
переменной части, то это увеличение весьма существенно:
![]() .
.
Таким образом, в зависимости от
особенностей решаемой задачи выбор размерности переменной части может
осуществляться разработчиком на основании следующих двух критериев: сокращения
аппаратного ресурса до уровня, позволяющего повысить скорость обработки за счет
увеличения степени распараллеливания, либо до уровня, обеспечивающего
приемлемое соотношение между временем решения задачи и накладными расходами на
настройку вычислительной структуры.
Данный подход позволяет решать прикладные
задачи различных проблемных областей с сокращением до 30% аппаратных затрат на
реализацию алгоритмов с глубокими циклами.
Литература
1. Каляев И.А., Левин И.И., Семерников Е.А., Шмойлов В.И. Реконфигурируемые
мультиконвейерные вычислительные структуры / под общ. ред. И. А. Каляева. 2-е
изд., перераб. и доп. Ростов-н/Дону : Изд-во ЮНЦ РАН, 2009. 344 с.
______________________________________
*Работа выполнена при финансовой поддержке Министерства образования и науки РФ по Соглашению о предоставлении субсидии №14.578.21.0006 от 05.06.2014, уникальный идентификатор RFMEFI57814X0006, гранту Южного федерального университета №213.01-2014/014 и НИР №2257 базовой части государственного задания №2014/174.