#Будяк В.С., , Сніжко Є.М.
Програмна широтна-імпульсна модуляція для управління сервоприводами у
роботизованій системі
Будяк В.С., , Сніжко Є.М.
Дніпропетровський
національний університет
Програмна
широтна-імпульсна модуляція для управління сервоприводами у роботизованій
системі
Постановка проблеми. Роботизовані
електромеханічні системи застосовуються в різних галузях науки, виробництва та
суспільного життя, Основними виконуючими механізмами (актуаторами) в таких
системах є сервоприводи, які разом із датчиками та системами управління,
складають основу роботизованих комплексів [1]. Тому значною проблемою є
розробка методів паралельного управління великою кількістю сервоприводів.
Стан проблеми. Відомі методи автоматичного управління діями маніпуляторів використовують принцип позиційного або силомоментного управління [2]. Широко використовується позиційний принцип управління, пов'язаний із застосуванням сервомеханізмів, в яких вхідний керуючий сигнал перетворюється в механічне лінійне або кутове переміщення керованого об'єкта [3]. В більшості випадків застосовують електричні серводвигуни, які розрізняються за принципом побудови електродвигуна (колекторні, безколекторні або змінного струму) та системи управління (аналогова чи цифрова). Для автономних систем часто використовують двигуни постійного струму з аналоговим управлінням (рис.1а) як більш енергоефективні, хоча й більш повільні (рис.1б).
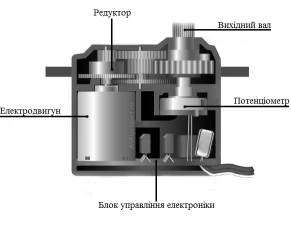
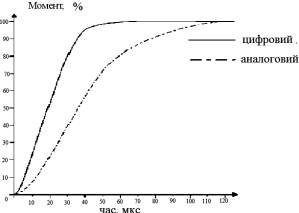
а бРис.1. Схема сервоприводу (а) та графік обертального моменту на валу (б)Сервопривод містить електродвигун, редуктор, датчик повороту (потенціометр або енкодер) та схему управління. Для аналогових систем ця схема порівнює сигнал з датчика з вхідним сигналом та подає живлення на двигун. Для цифрових систем застосовується мікропроцесор. Основні характеристики використаних сервоприводів, наведені на табл. 1.Основні характеристики сервоприводів SG 90, SG5010 Табл. 1
|
Характеристики |
SG 90 |
SG 5010 |
|
Робоча напруга |
3.5-8.4 В |
3.5 - 8.4В |
|
Кут повороту |
180 градусів |
180 градусів |
|
Швидкість повороту |
0.12 с /60
градусів |
0.14 с/60 градусів |
|
Зусилля на валу |
2 кг |
5,2-6,5 кг |
|
Робоча температура |
-30 +60 оC |
-30 +60 оC |
Постановка задачі. Розроблена програмна
реалізація генерації широтно-молульованих імпульсів для управління великою
кількістю аналогових сервоприводів (до 16).
Основні результати. Для управління
роботизованою інформаційною системою, у якій невербальна інформація передається
через зміни виразів макета обличчя, використаний мікроконтролер AVR ATMega328.
Для зміни положень окремих елементів макету використовуються серводвигуни SR90 та SR5010. Сигнал
управління передається у вигляді імпульсів певної ширини кожні 20 мс (рис.2а).
Вибраний мікроконтролер має лише 6 апаратних блоків широтної модуляції, тому
.була реалізована генерація відповідних імпульсів у програмі, написаній мовою
Сі [4].
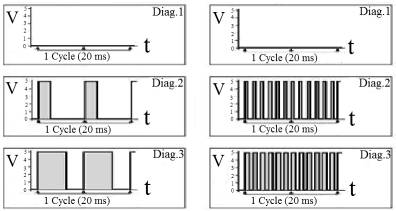
а б
Рис.2.
сигнали управління аналоговим (а) та цифровим (б) сервоприводом
Для підключення сервоприводів застосована перехідна плата Sensor Shield
V5.0, яка дозволяє також підключити різноманітні датчики (наближення,
освітлення, температури та ін.) за інтерфейсами SPI, TWI, 1-Wire. Блок живлення
забезпечує струм до 10 А при вихідній напрузі 5В.
Для реалізації точних часових інтервалів використана система переривань
мікроконтролера за таймером 1. Програма переривань викликається, щоб сформувати
імпульси потрібної ширини на кожному управляючому виході мікроконтролера.
Мікроконтролер отримує послідовність включень та положення кожного сервопривода
від персонального комп’ютера через інтерфейс USB. Ця послідовність може також запам’ятовуватися у внутрішній
енергонезалежній пам’яті як сценарій для автономного виконання.
Висновки та подальші перспективи
досліджень. Розроблений роботизований комплекс для інформаційної системи, яка
побудована на основі мікроконтролера та серводвигунів для управління виразом
макету обличчя. Це дозволило, крім аудіо інформації, передавати також
невербальну інформацію за вибраним сценарієм. Для управління аналоговими
серводвигунами розроблена програма для мікроконтролера, яка генерує управляючі
широтно-модульовані імпульси на цифрових виходах. Програма показала свою
ефективність та надійність в роботі. В подальшому планується збільшити
кількість сервоприводів, щоб виконувати
більш складні сценарії відображення невербальної інформації.
Список літератури
1. Robotics and Automation Handbook / ed. T R.
Kurfess. CRC Press, 2005
2. Кремлев
А.С., Зименко К.А., Боргуль А.С.Моделирование и программирование робототехнических
комплексов, СПб., 2013, 185 с.
3. Предко М. Устройства управления роботами. ДМКпресс, 2004, 403 с.
4. Прокопенко В. С. Программирование
микроконтроллеров ATMEL на языке С. К., МК-Пресс, 2012, 308 с.