#Лучков
В. В., Коц І. В. Моделирование рабочего
процесса виброгрохота с импульсным гидроприводом
Техническое
машиностроение /3.Отраслевое машиностроение
Лучков В.В., Коц И.В., к.т.н.
Винницкий национальный технический университет
Моделирование рабочего процесса виброгрохота с импульсным гидроприводом
Повышение эффективности технологических
процессов разделения, транспортирования и погрузки горной массы существенно
зависит от надежности работы грохотов [1-2]. В НИЛ
гидродинамики Винницкого национального технического университета ведутся разработки и исследование различных конструктивных решений
гидравлических возбудителей колебаний для грохотов разных типоразмеров[ 4, 5 и др.].
На рисунке показана типовая конструктивная
схема гидравлического привода возбудителя колебаний, который использовался для
возбуждения колебаний виброгрохота, предназначенного для отсева мелочи кокса,
агломерата, окатышей и других сыпучих материалов крупностью кусков исходного
продукта не более 300...400 мм. Виброгрохот состоит из транспортирующего органа
1, основания 2, соединенных друг с другом при помощи упругих элементов возврата
3. В качестве исполнительного органа возбудителя колебаний используется
плунжерный гидроцилиндр, включающий плунжер 4 и корпус 5, установленный под
некоторым углом к направлению транспортирования. Рабочая полость плунжерного
гидроцилиндра при помощи трубопроводов 6 соединена с насосом 7, приводимым в
движение электродвигателем 8, а также с генератором импульсов давления – двухкаскадным клапаном-пульсатором [4, 5 и др.].
Под действием давления рабочей жидкости,
поступающей от приводного гидронасоса 7 в рабочую полость 11 плунжерного
силового гидроцилиндра, происходит перемещение – прямой ход плунжера 4 относительно корпуса 5, а также контактирующего
с ним транспортирующего органа 1 и технологической нагрузки – сыпучей горной
массы, находящейся на нем, в направлении смещения плунжера 4. При этом
одновременно происходит деформация упругих элементов возврата 3 и накапливание
потенциальной энергии для последующего обратного хода. В этом положении рабочая
жидкость под давлением от приводного гидронасоса 7 также подается в подклапанную полость 15 и посредством
открытой дроссельной щели между кромкой золотника 12 и кольцевой расточкой 19 в
надклапанную полость 10.
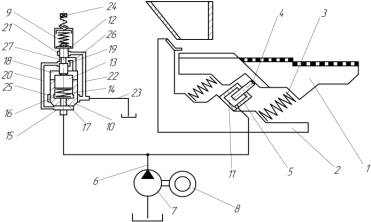
Рисунок. Конструктивная схема гидравлического привода возбудителя
колебаний виброгрохота
Клапан второго каскада 11 при этом прижат
рабочим давлением к седлу, так как усилие от давления рабочей жидкости на
площадь поперечного сечения, на которую воздействует оно со стороны
надклапанной полости 18 в сумме с усилием пружины 14 больше, чем усилие
противодействия со стороны подклапанной полости 15. Усилие от давления рабочей
жидкости, поступающей в полость 16, посредством плунжера-толкателя 13 воздействует
на двухкромочный золотник 12 и по достижении некоторого заданного давления рН , на которое настроена
пружина 9, он начинает перемещаться. При этом дроссельная щель, связывающая
кольцевую расточку высокого давления 19 через канал 26 с надклапанной полостью
18 закрывается и происходит соединение надклапанной полости 18 со сливной
кольцевой расточкой 21. Соединение надклапанной полости 18 со сливной
магистралью приводит к падению давления в ней до сливного. Со стороны
подклапанной полости 15 создается усилие давления, способное открыть клапан
второго каскада 10, и он открывается. При этом напорная магистраль 6 и рабочая
камера 11 соединяются со сливной магистралью. Давление в гидросистеме падает до
сливного. Под действием потенциальной энергии, аккумулированной упругими
элементами – пружинами возврата 3, осуществляется перемещение – обратный ход транспортирующего органа 1 и плунжера 4
в исходное положение. Так как, проекция ускорения на вертикальную ось при
перемещении транспортирующего органа будет значительно больше ускорения
свободного падения транспортируемого материала – горной массы, то произойдет их разделение. Таким образом,
транспортирующий орган 1 грохота вернется в исходное положение, а
транспортируемый материал, совершающий свободное падение переместится в
горизонтальном направлении и в конце падения встретится с транспортирующим
органом 1. Рабочий плунжер 4 при этом вытесняет рабочую жидкость из рабочей
камеры 11 на слив через открытый клапан второго каскада 10. При понижении
давления в гидросистеме до минимума пружина 9 перемещает двухкромочный золотник
12 и плунжер-толкатель 13 в исходное положение, а пружина 14 закрывает клапан
второго каскада 10. Под действием усилий от увеличивающегося давления рабочей
жидкости, происходит фиксирование всех элементов гидрораспределителя в исходном
положении и начинается следующий рабочий цикл, который повторяется в
автоматическом режиме. В результате последовательных периодических импульсов
зарядки и разрядки упругих элементов 3, будет происходить колебательное
движение плоскостей транспортирующего органа 1, способствующее перемещению
транспортируемого материала вдоль плоскостей транспортирования.
К положительным качествам рассмотренного
устройства следует отнести простоту схемы управления процессом осуществления
возвратно-поступательных ходов исполнительного органа – плунжера 4, так как
управление в данном случае осуществляется только по потоку рабочей жидкости
(изменением давления срабатывания при помощи настройки пружины и изменением
расхода приводного гидронасоса 8). Так как работа данного генератора импульсов
давления – клапана-пульсатора практически не зависит от исходных условий, а
определяется только величиной давления жидкости в рабочей камере в момент
затяжки пружины возврата, то стабильность рабочего цикла и надежность
функционирования при этом также повышается.
Для аналитического исследования рабочего
процесса этой системы разработана
математическая модель, на основе
анализа которой проводится изучение качественных и количественных зависимостей
технических показателей устройства от конструктивных, силовых и энергетических
параметров.
При составлении дифференциальных
уравнений, которые описывают математическую модель гидропривода были сделаны
следующие основные предположения: температура и вязкость рабочей жидкости
изменяются незначительно; волновыми процессами пренебрегаем, учитывая небольшую
протяженность трубопроводов; механическая характеристика приводного
электродвигателя принимается линейной; коэффициент сжимаемости b, который характеризует суммарный эффект сжимаемости
рабочей жидкости и деформации соединительных трубопроводов принимается
постоянным [4, 5]; переходной процесс срабатывание двухкаскадного
клапана-пульсатора на слив считается релейным, то есть таким, что происходит за
достаточное малое время по сравнению с продолжительностью прямого или обратного
хода; при открытии клапана-пульсатора
площадь его проходного сечения изменяется релейно от 0 к fсл;
давление на сливе принимается постоянным; временем торможения в конце прямого и
обратного хода, учитывая его малую величину пренебрегаем; производительность Qн
гидронасоса принимается постоянной, то
есть независимой от величины давления в гидросистеме; объемные потери рабочей
жидкости в гидросистеме не учитываются вследствии их малой величины;
транспортированный сыпучий материал для упрощения расчетов принимается в виде
сосредоточенной массы и абсолютно жестким.
Фаза прямого хода описывается уравнениями
движения транспортирующего органа грохота совместно с транспортированным
материалом вверх в проекциях на горизонтальную и вертикальную оси:
![]() (1)
(1)
 (2)
(2)
и уравнением связи, полученным из условия
неразрывности потока в гидросистеме:
 (3)
(3)
В уравнениях (1)-(3) обозначено: М=m1+m2
– суммарная масса транспортирующего органа грохота m1 и массы
сыпучего материала на нем m2;  и
и  – соответственно проекции на горизонтальную и вертикальную
оси ускорения, скорости и перемещения центра массы транспортирующего органа
грохота; m - коэффициент вязкого
демпфирования; с – жесткость упругих элементов возврата; р –
текущее давление в гидросистеме; Fпл
– эффективная рабочая площадь плунжера 4; WГ – общий объем
гидросистемы; α – угол наклона оси плунжера силового гидроцилиндра к
горизонту; g – ускорение
свободного падения.
– соответственно проекции на горизонтальную и вертикальную
оси ускорения, скорости и перемещения центра массы транспортирующего органа
грохота; m - коэффициент вязкого
демпфирования; с – жесткость упругих элементов возврата; р –
текущее давление в гидросистеме; Fпл
– эффективная рабочая площадь плунжера 4; WГ – общий объем
гидросистемы; α – угол наклона оси плунжера силового гидроцилиндра к
горизонту; g – ускорение
свободного падения.
Фазу обратного хода можно представить
соответственно уравнениями:
– движения транспортирующего органа вниз отдельно от
транспортированного груза в проекциях на горизонтальную и вертикальную оси:
 (4)
(4)
 (5)
(5)
– расхода из рабочей
полости и гидросистемы на слив через проходное сечение основного выпускного
отверстия клапана-пульсатора :
 (6)
(6)
– свободного падения транспортированного материала,
который подвергается грохочению:
 (7)
(7)
 (8)
(8)
В уравнениях (4) – (8) введены
дополнительные обозначения: х10 и у10 – координаты
смещений транспортирующего органа грохота в фазе прямого хода; s=кfсл![]() – гидропроводимость основного проходного сечения автоматического
гидрораспределителя – двухкаскадного клапана-пульсатора, где к – коэффициент гидравлических потерь; fсл – проходная
площадь поперечного сечения в основном
выпускном отверстии клапана-пульсатора; r - плотность рабочей жидкости;
– гидропроводимость основного проходного сечения автоматического
гидрораспределителя – двухкаскадного клапана-пульсатора, где к – коэффициент гидравлических потерь; fсл – проходная
площадь поперечного сечения в основном
выпускном отверстии клапана-пульсатора; r - плотность рабочей жидкости; 
 – соответственно
проекции ускорения центра масс транспортированного
материала, который подлежит грохочению.
– соответственно
проекции ускорения центра масс транспортированного
материала, который подлежит грохочению.
Аналитическое решение системы уравнений наиболее целесообразным численными методами на ЭВМ.
Авторами разработана специальная программа решения этих систем уравнений (1) – (8), методом Рунге-Кутта-Мерсона с использованием
стандартных подпрограмм. Результаты решений уравнений прямого хода были исходными
для решения уравнений обратного хода.
На основе результатов аналитических
исследований были изготовлены экспериментальные образцы виброгрохотов с
гидравлическим приводом предложенной конструкции. Ведутся работы по
дальнейшей экспериментальной проверке
теоретических результатов и внедрению опытно-промышленных образцов
виброгрохотов в производство.
Выводы
1. Разработана
конструктивная схема гидравлического толкающего привода возбудителя колебаний
грохота, который дистанционно управляется с помощью генератора импульсов
давления – двухкаскадного клапана-пульсатора.
2. Предлагаемая математическая модель рабочего процесса гидравлического привода позволяет обосновать
кинематические, динамические и геометрические параметры рассматриваемой
колебательной системы виброгрохота в зависимости от режимов его работы и
величин прикладываемых нагрузок.
Литература:
1. Вопросы
динамики тяжелых грохотов с пневматическим толкающим приводом / Потураев В.Н., Круш И.И., Шифрин
Л.М., Сергиенко А.В.- В кн.: Теория и расчет
горных машин. Сб. науч. тр. – Киев: Наукова думка, 1982. – С. 116 – 120.
2.
Вайсберг
Л.А. Вибрационное грохочение сыпучих материалов. Моделирование
процесса и технологический расчет грохотов / Вайсберг Л.А., Рубисов Д.Г.–
СПб.: 1994. – 47 с.
3. Иванов М.Е.,
Искович-Лотоцкий Р.Д., Коц И.В. Специальная гидроапаратура управления короткоходовыми
возвратно-поступательными прямолинейными и вращательными перемещениями в
машиностроении. Обзор. – М.: НИИМаш, 1982. – 52 с.
4. А.с. №
906844 СССР. МКИ В 65 G 25/08. Привод
конвейера переталкивающего типа / Б.А. Земляков, И.В. Коц, П.В. Плащевский
(СССР). – № 2961164/24-12. Заявлено 16.07.80; Опубл. 23.02.82, Бюл. № 7. – С.42.
5. Патент України № 91402. МПК B65G 27/00. Вібраційний конвеєр для транспортування сипучих матеріалів / І. В. Коц, Н.П. Бадьора, О. П. Колісник, А.
М. Власенко. № u201309937. Заявлено 09.08.2013. Опубл. 10.07.2014, Бюл. № 13. –
С.28.