#Бекмамбет
К.М. и др. ШАГАЮЩЕЕ КОЛЕСО ДЛЯ НАДЗЕМНОГО ТРАНСПОРТНОГО СРЕДССТВА
Муратов
А., Кайнарбеков А.К., Бекмамбет К.
Алматы, Республика Казахстан
ШАГАЮЩЕЕ
КОЛЕСО ДЛЯ НАДЗЕМНОГО ТРАНСПОРТНОГО СРЕДССТВА
Шагающее колесо так называемый «қаңбақ» в переводе на русский язык «перекати поле» для надземного транспортного средства имеет простейшую
конструкцию и состоит всего из двух элементов: корпуса ступицы и штанги, которые двигаются относительно друг друга
при перекатывании колеса. Конструктивное исполнение может быть разнообразным,
но конструкция этих двух элементов имеет определяющее значение для создания
эксплуатационной надежности колеса. Корпус ступицы (рисунок 1) имеет сложную
конфигурацию, поэтому расчетная схема должна сохранять некоторую взаимозависимость
размеров, которые указаны на чертеже.
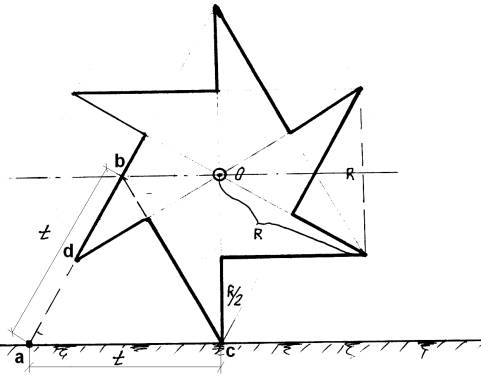
Рисунок 1. Расчетная схема корпуса ступицы
Расчетная схема корпуса ступицы получена из условий
взаимодействия двух равносторонних треугольников авс и doc. Одна сторона cd треугольника doc является биссектрисой внутреннего угла второго
треугольника авс, длина стороны
которого является шагом колеса. За один оборот корпус ступицы колеса делает
шесть шагов с помощью шести жестких спиц длиной R (длина стороны первого треугольника doc). Форму
расчетной схемы корпуса можно дополнять, но расчетные линии должны сохраняться
при выполнении рабочего чертежа.
Корпус ступицы может быть выполнен из различных
материалов с учетом особенностей относительного перемещения корпуса и штанг.
Они могут перемещаться относительно друг друга при наличии скользящего
контакта, а также при наличии качающего контакта. Однозначно утверждать
преимущество одной из этих особенностей довольно сложно, т.к. они зависят от
многих факторов, например, характера действия внешних сил, работы в различных
климатических условиях, от материала контактирующих элементов и т.д.
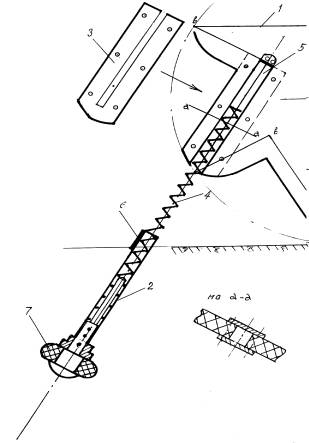
Рисунок 2.
Первый вариант соединения корпуса со
штангой
Рассмотрим несколько принципиально возможных вариантов
конструкций взаимодействующих элементов корпуса ступицы и штанги.
Первый вариант (рисунок 2). В случае
скользяще-контактного движения штанги 2
по направляющей 5 корпуса ступицы 1 предлагается корпус изготовить из
технического капрона, а штангу - из тонкостенной трубки углеродистой стали. При
этом толщина листового капрона равна диаметру трубки штанги.
Расчетная схема корпуса ступицы дополнена для
совмещения с осью трубки 2 расчетной
линии в-в корпуса (дополнение
размерного контура на рисунке 30 показано жирными линиями).
В корпусе вырезана направляющая 5 по размеру наружного диаметра трубки штанги 2 с установленной внутри возвратной
пружиной стержня 4. Для подвижного
фиксирования трубки штанги внутри направляющей корпуса на одной из крышек 3 выполнен паз расчетной длины, а на
верхнем конце трубки штанги снаружи сварена ограничительная шпонка 6.
Нижний конец
штанги снабжен стопой, содержащей колесо из капрона 7, которое свободно вращается относительно оси, закрепленной
неподвижно с внутренней части трубки штанги.
Такая конструкция стопы выполнена в связи с
необходимостью нейтрализовать боковую нагрузку, действующую на штанги при
повороте, т.к. колесо перекатывается стоя на двух опорах.
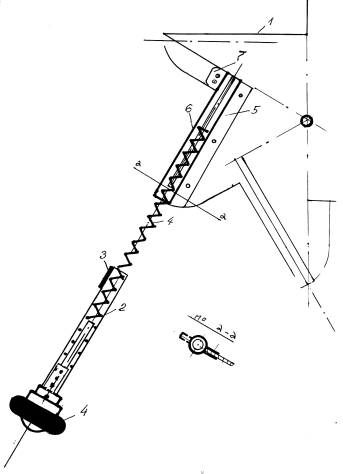
Рисунок 3. Второй вариант соединения корпуса со
штангой
Использование технического капрона в конструкции шагающего колеса позволяет
упростить конструкции трущихся узлов - подшипники и несущие элементы в
сочленениях.
Однако такое исполнение конструкции шагающего
колеса вызывает некоторые опасения,
т.к. капрон обладает низкой теплопроводностью и при температуре 80° теряет работоспособность.
Соприкасающиеся поверхности корпуса со
штангой при их относительных перемещениях могут вызвать нагрев за счет силы
трения. За один оборот колеса штанги с корпусом ступицы по одному разу
выполняют силовое соприкосновение, а величина силы трения при этом будет
зависеть от силы веса, проходящей через центр ступицы корпуса.
Все эти неопределенности требуют опытной проверки,
которые могут быть выяснены при испытаниях колеса в различных условиях
эксплуатации.
Второй вариант (рисунок 3). Шагающее колесо по
конструкции подобно предыдущему варианту. Различие заключается в том, что
корпус ступицы и штанги изготавливаются из углеродистой и легированной стали.
Корпус ступицы 1 желательно выполнить из упрочненного стального
листового проката. Штанги удобно выполнить из углеродистой стальной трубки как
в предыдущем варианте. В корпусе ступицы разъемно с болтовым креплением
соединяются соединительные ребра 5
трубки 6. Трубка 6 (сечение по а-а) неподвижно соединена с ребрами 5 и 7
с помощью сварки.
Трубка
штанги, с заправленной во внутрь
пружиной 4, входит в трубку 6 жесткой спицы и фиксируется там с
помощью шпонки 3 штанги. Стопа 4, выполненная аналогично
предыдущему варианту, соединяется с
осью, прикрепленной неподвижно к нижней
части трубки 2 штанги с возможностью
вращения вокруг этой оси.
Этот вариант
более надежный в плане прочности элементов, но слабым местом является
скользящий контакт трубки штанги 2 с
трубкой жесткой спицы 6, где в процессе эксплуатации может возникнуть
интенсивный износ. Этот недостаток
может быть устранен различными способами в дальнейшем процессе отработки
надежности конструкции.
Третий вариант (рисунок 4). Конструкция шагающего
колеса «қанбақ» выполнена с использованием контактного качения в
соединениях относительного перемещающихся звеньев (штанги с корпусом ступицы).
С
расчетной линией с-с корпуса ступицы 1 совмещается общая ось направляющей
корпуса 2 и штанги 5. Направляющая закрепляется болтами
неподвижно, но разъёмною к корпусу 1.
Направляющая 2 (сечение а-а) состоит
из двух рам 3 с клиновидными пазами,
закрепленными между собой с помощью двух крышек 9. В нижней части направляющей составной рамы
установлены два ролика 4
для прямолинейной ориентации стержня штанги 5, в верхней части которой установлен ролик, перемещающийся по
клиновидным пазам направляющей. В нижней части штанги установлены колесики 7 для облегчения поворота колеса. Ролик 6 штанги, выполненный клиновидным
выступом, входит в клиновидный паз рамы 3
корпуса направляющей 2.
Установленные
ролики 3 направляющей и
ограничительный болт штанги зафиксируют штанги в сборе внутри направляющей
корпуса ступицы. В верхней части штанги закрепляется возвратная пружина
растяжения 8, нижняя часть которой
закрепляется к жесткой спице корпуса ступицы.
Возвратная пружина 8
удерживает штанги в нижней части направляющей в опущенном положении. При
перекатывании колеса, выпущенная часть штанги входит в направляющий паз,
растягивая возвратную пружину 8, до
тех пор, пока процесс выполнения одного шага колесом не закончится. При отрыве
штанги от поверхности дороги возвратная пружина 8 приводит ее в исходное положение.
Этот вариант конструкции исключает проблемы износа
поверхности направляющей корпуса ступицы, а также улучшает жесткость конструкции
колеса. Использование стали в качестве материала деталей колеса дает немалое
преимущество. Кроме того, установка возвратной пружины растяжения с наружной
части конструкции увеличивает эксплуатационную надежность колеса.
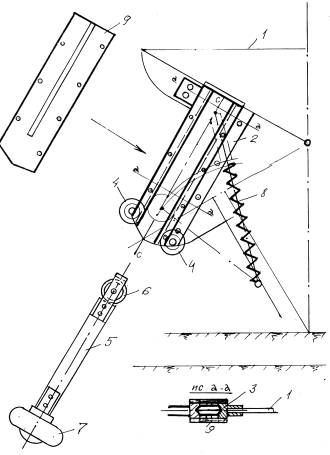
Рисунок 4 Третий вариант соединения корпуса со штангой
Установленные
ролики 3 направляющей и
ограничительный болт штанги зафиксируют штанги в сборе внутри направляющей
корпуса ступицы. В верхней части штанги закрепляется возвратная пружина
растяжения 8, нижняя часть которой
закрепляется к жесткой спице корпуса ступицы.
Возвратная пружина 8
удерживает штанги в нижней части направляющей в опущенном положении. При
перекатывании колеса, выпущенная часть штанги входит в направляющий паз,
растягивая возвратную пружину 8, до
тех пор, пока процесс выполнения одного шага колесом не закончится. При отрыве
штанги от поверхности дороги возвратная пружина 8 приводит ее в исходное положение.
Этот
вариант конструкции исключает проблемы износа поверхности направляющей корпуса
ступицы, а также улучшает жесткость конструкции колеса. Использование стали в
качестве материала деталей колеса дает немалое преимущество. Кроме того,
установка возвратной пружины растяжения с наружной части конструкции
увеличивает эксплуатационную надежность колеса.
ЛИТЕРАТУРА
1. Муратов А.М., Кайнарбеков А.К. и др. Шагающие движители: Учебное пособие.
«Бастау», г Алматы, 2000. 182с.
2. Муратов А.М., Кайнарбеков А.К. «Гусенично-шагающий
движитель транспортного средства»: пред. патент РК №11006, г. Алматы,
14.11.2001, бюл.№12.
3. А.Кайнарбеков,
А.Омаров, А.Муратов А. Хикаят шагающего колеса. «LAP» LAMBERT Academic
Publishing, ,Saarbrücken, Germany, 2014.
4. Омаров А.Д., Муратов А., Кайнарбеков А., Бекмамбет
К.М. «Бездорожное транспортное средства»: г. Алматы, 2015г. 182стр.