Технические науки/12.
Автоматизированные системы управления на производстве
Асп. Данник О. І.
Полтавський національний
технічний університет імені Юрія Кондратюка, Україна
Розмічувальна
машина як об’єкт керування в системі автоматичного водіння
Засоби автоматизації,
які використовуються на сучасному обладнанні для розмітки автомобільних доріг і
аеродромів по функціональному призначенню поділяються на чотири групи [1]:
- системи
автоматичного керування (САК) довжиною штрихів і проміжків переривчастих ліній
розмітки;
- системи
автоматичного підтримання заданої товщини ліній, що наносяться;
- САК розігрівом
термопластичних матеріалів;
- САК курсом
розмічувальної машини.
На сучасному етапі розвитку техніки для обслуговування дорожніх шляхів
досить актуально постає проблема автоматизації процесу водіння машин для
нанесення дорожньої розмітки [2].
Автоматична система керування
рухом розмічувальної машини має забезпечувати певну траєкторію й інтенсивність
руху із заданою точністю та стійкістю. Створення якісної автоматичної системи
керування можливе лише при врахуванні властивостей керованого об’єкта
(розмічувальної машини) і умов руху.
Керування рухом розмічувальної
машини по заданій траєкторії, тобто керування її поточними координатами,
здійснюється шляхом повороту керованих коліс. При керуванні курсом руху
передавальну функцію розмічувальної машини
можна записати так [3, 4, 5]:
![]()
![]() або
або ![]()
Вона виражає відношення або
зображення лінійного відхилення Y(p), або зображення кута повороту γ(p) повздовжньої вісі машини до
кута повороту θ(p) керованих коліс.
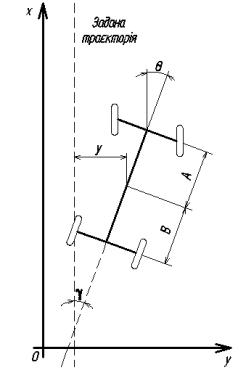
Рис. 1. До виведення рівняння руху розмічувальної машини
Лінеаризоване рівняння руху
розмічувальної машини по криволінійній траєкторії, отримане з розрахункової
схеми, зображеної на рис. 1, має вигляд [3]:
![]()
У цьому рівнянні прийняті
наступні скорочення:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ,
,
де А і В – відстані від центра
ваги до переднього й заднього мостів;
kδ1, kδ - коефіцієнти опору уводу переднього і заднього
мостів; Jz - момент інерції розмічувальної машини навколо
вертикальної вісі, яка проходить через центр ваги машини; Va - швидкість руху, ma - маса розмічувальної машини.
Запишемо рівняння (3) в операторній формі:
![]() ,
,
де b1=Q+D, b2=Q·D-M·C, a1=E·D-N·M, a2=E.
Передавальна функція
розмічувальної машини при керуванні напрямком руху
![]()
де k0 – коефіцієнт передачі
розмічувальної машини як об’єкта автоматичного керування напрямком руху, T1, T2 - постійні часу, ξ - коефіцієнт затухання.
Таким чином, розмічувальну
машину можна представити ланкою, що складається з послідовного з’єднання
інтегруючої, диференціюючої й стійкої коливальної ланки.
Література
1. Автоматизация
строительных и дорожных машин: Сборник научных трудов. Вып. 112. – М.:
ВНИИстройдормаш, 1988. – 112 с.
2. Данник О. І.,
Нелюба Д. М. Проблема автоматизації водіння розміточних машин // Современные
направления теоретических и прикладных исследований (том 3): междунар.
науч.-практ. конф., 16-27 марта 2009 г.: тезисы докл. / Науч.-иссл.
проект.-констр. институт морского флота Украины. – Одесса, 2009. – с. 72-73.
3. Ветлинский
В. Н., Осипов А. В. Автоматические системы управления движением
автотранспорта / В. Н. Ветлинский, А. В. Осипов. – Л.: - Машиностроение,
Ленингр. отд-ние, 1986. – 216 с.
4. Литинский С. А. Автоматизация вождения самоходных машин (автоводители) / С. А.
Литинский. – М. – Л.: «Энергия», 1966. – 166 с.
5. Хачатуров А. А. Динамика системы дорога-шина-автомобиль-водитель / А.
А. Хачатуров. – М.: «Машиностроение»,
1976. – 535 с.