Тези/Автоматизовані системи управління на виробництві
УДК 681.518.22
О.В.Гутак, Л.І.Давиденко, М.В.Поснова
ЗАДАЧІ ВИЯВЛЕННЯ В ЗАГАЛЬНІЙ
ПРОБЛЕМІ АДАПТИВНОГО ОПТИМАЛЬНОГО КЕРУВАННЯ ПРОЦЕСОМ БУРІННЯ НАФТОВИХ І ГАЗОВИХ
СВЕРДЛОВИН
Передумовою
успішної реалізації системи адаптивного оптимального керування процесом буріння
нафтових і газових свердловин є виявлення [1,2]:
-
моменту зміни умов буріння, викликаних переходом долота в пласт породи
іншої буримості;
-
моменту закінчення процесу буріння в черговому рейсі долота за технічним
станом озброєння долота або його опори;
-
передаварійних ситуацій або ускладнень, викликаних геологічними та
технологічними причинами.
Відсутність
методів виявлення вище названих явищ і недосконалість існуючої системи
керування процесом буріння є одним із стримуючих факторів при впровадженні
інтелектуальних технологій автоматизації процесів керування
пошукового-розвідувальних і експлуатаційних свердловин. Цим обумовлюється
актуальність створення таких методів.
Аналіз
літературних джерел [1,2,3 та ін.] показує недостатній об’єм проведених досліджень у цьому напрямку. Тому метою даної роботи
є аналіз елементів задачі виявлення в бурінні згідно теорії рішень і
дослідження властивостей таких інформативних параметрів як механічна швидкість
буріння V(t) і питомі витрати
енергії w(t).
В
задачах виявлення важливим елементом є джерело узагальненої інформації 1, яке створює деяку вхідну величину для
системи прийняття рішень 2÷4
(рис.1).
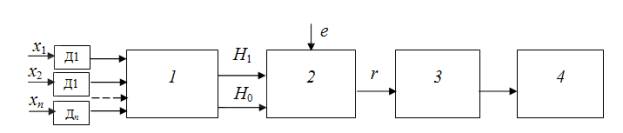
Рисунок 1 – Структура прийняття рішення:
х1÷ хn – контрольовані параметри;
Д1÷ Дn – давачі;
1 – джерело узагальненої інформації;
2 – ймовірнісний механізм переходу;
3 – простір спостережень;
4 - правило рішення
Ця вхідна величина являє собою результат
вибору з двох можливих значень, які можна назвати гапотезами Н0 і Н1
.
Розглянемо
декілька типових механізмів джерел інформації:
• під час
виявлення моменту закінчення рейсу долота гіпотеза Н1 може відповідати тому, що долото перейшло в
завершальний період роботи (катастрофічний), тоді як Н0 – тому, що триває основний період роботи долота;
• під час
виявлення зміни умов буріння гіпотеза Н1
може відповідати тому, що долото перейшло в пласт породи іншої буримості, тоді
як Н0 – тому, що буріння
триває в однорідних породах;
• під час
виявлення, наприклад, такої аварії як обвал стінок свердловини з втратою
циркуляції бурового розчину і рухомості бурильного інструменту гіпотеза Н1
може відповідати тому, що відбулася аварія – обвал стінок свердловини, тоді як Н0 – тому, що продовжується
буріння без ускладнень і передаварійних ситуацій.
Проте, слід
відзначити, що в усіх випадках нам відомо, яка саме гіпотеза є істинною.
Другим
елемнтом задачі виявлення є ймовірнисний механізм переходу, який можна
розглядати як деякий пристрій, який знає, яка гіпотеза є істинною. Базуючись на
цьому значенні, він генерує деяку точку в просторі спостережень у відповідності
з деяким ймовірнісним законом.
Третім
елементом задачі теорії рішень є простір спостережень. Коли справедлива
гіпотеза Н1, то джерело
інформації 1 генерує +1,
а коли вірною є гіпотеза Н0 ,
джерело генерує -1. Проте, до
вихідної величини джерела додається незалежна дискретна випадкова величина е. Сума вихідної величини джерела і
величини е є величиною r, що спостерігається. Отже маємо для двох гіпотез:
Н1: r1 = 1+ е ; Н0: r2 = -1+ е; (1)
Четвертим
елементом задачі виявлення є правило рішення. Дійсно, після отримання
результату в просторі спостереження нам треба встановити, яка гіпотеза була
істинною. Для цієї процедури вводять правило рішення, згідно якому кожна точка
відноситься до однієї з гіпотез і є точкою в просторі спостережень. Цей простір
відповідає N результатів спостережень: r1, r2,…, rN Тому кожний ряд можна представити як точку в N-мірному просторі і позначити вектором ![]() :
:
 . (2)
. (2)
Ймовірнисний
механізм переходу генерує точки в просторі спостережнь у відповідності з двома
невідомими умовними густинами ймовірностей
![]() і
і ![]() . (3)
. (3)
Подальшою
метою є використання цієї інформації для виробки відповідного правила рішення.
Аналіз задач
виявлення в бурінні дозволив встановити, що основними показниками процесу
буріння, які можуть бути використані для виявлення моменту закінчення процесу
буріння, моменту зміни умов буріння і декількох переаварійних ситуацій і
ускладнень є механічна швидкість буріння V(t).
Для
визначення основних статистичних характеристик випадкової функції Vм(t) скористалися
результатами промислових експериментів, які були проведені на свердловині №185
«Північна Долина» Прикарпатського УБР. Проектна глибина 2700м, мета буріння –
експлуатація, вид свердловини – похило-спрямована, бурова установка Уралмаш
УЕ-76, ротор Р-560, двигуни лебідки і ротора АКБ-114-6 – 2 шт. потужністю 640
кВт, привід насосів СДБО-99/49-8 – 2 шт. потужністю 1260 кВт, трансформатор
ТМБ-250-630/10. Буріння відбувалося на глибині 1800-1820м долотом ІІІ295,3
С-ЦВ, електробуром Е240-8Р з осьовою силою на долото Р= 120 кН, швидкістю обертання 230 об/хв, тиск на стояку 113,7
кгс/см2, продуктивність насосів 32,0 л/с, розбурювані породи –
тверді поляницької світи.
Графік зміни
механічної швидксоті буріння V(t) в часі наведено на рис.2.
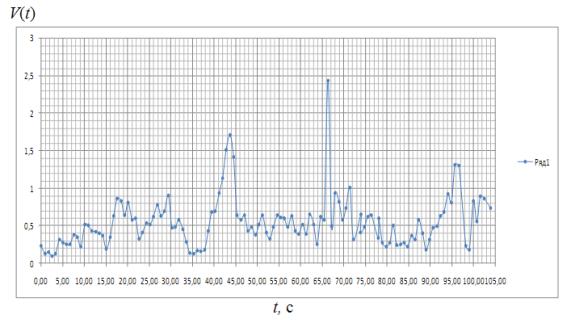
Рисунок 2 - Графік зміни
механічної швидксоті буріння V(t) в часі
Для перевірки
властивості ергодичності випадкової функції V(t) визначили її нормовану автокореляційну функцію [4,5]
 , (5)
, (5)
де 2Т – довжина реалізації;
τ
– проміжок часу, на який зсунуті випадкові функції V(t) і V(t + τ).
Оскільки
для нормованої автокореляційної функції Rvv(τ) ергодичного процесу
повинні виконуватися такі умови:
Rvv(0) = 1,
Rvv(0) ≥ Rvv(τ),
Rvv(τ) < 1, якщо τ
> 0, (6)
![]() ,
,
Rvv(τ) = Rvv(-τ),
проаналізуємо графік Rvv(τ), наведений на рис.3.
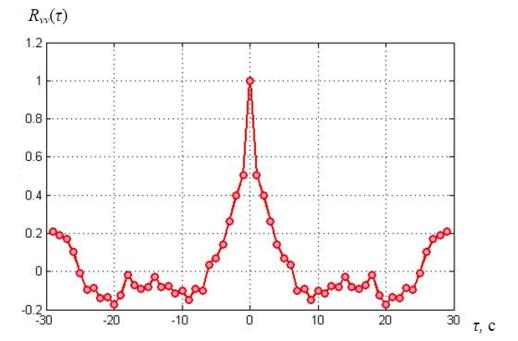
Рисунок 3 – Графік автокореляційної функції Rvv(τ)
Бачимо, що нормована
автокореляційна функція Rvv(τ), яка наведена на рис.3,
відповідає умовам (6). Отже процес V(t) є ергодичним віпадковим процесом. Крім того, випадковий
процес V(t) містить періодичну складову.
Отже,
користуючись графіками автокореляційних функцій Rvv(τ) можна розрахувати
період дискретного вимірювання середньої механічної швидкості буріння нафтових
і газових свердловин за заданим
технологом значенням середньої квадратичної похибки апроксимації і налаштувати
комутатор опитування давачів.
Література:
1.
Ушмаев В.И. Централизованный контроль технологических процессов бурения
/ В.И.Ушмаев // М.: ВНИИОЭНГ, 1972. –
76 с.
2.
Горбійчук М.І. Оптимізація процесу буріння глибоких свердловин /
М.І.Горбійчук, Г.Н.Семенцов. – Івано-Франківськ: Нова Зоря, 2003. – 493 с.
3.
Семенцов Г.Н. Автоматические и промысловые исследования влияния шага дискретизации
проходки на погрешность измерения механической скорости бурения / Г.Н.Семенцов,
А.А.Шаповал // РНТС Автоматизация и телемеханизация в нефтяной и газовой
промышленности. – 1976. - №10. – С.11-15.
4.
Санковский Е.А. Вопросы теории автоматического управления / Е.А.Санковский
// М.: Высшая школа. – 1971. – 231 с.
5.
Лукас В.А. Теория автоматического управления / В.А.Лукас / Учебн.для вузов,
2-е изд.,перероб. И доп. – М.: Недра, 1990. – 416 с.