Технические науки/12. Автоматизированные системы управления на производстве
Д.т.н.
Федосенков Б.А., Карнадуд Е.Н., к.т.н. Федосенков Д.Б.,
Цыганенко
О.В., Князьков Е.И.
Кемеровский технологический институт пищевой промышленности, Россия
Комплекс управления техническим объектом
в вейвлет-среде
Рассмотрены вопросы структурного
формирования и информационно-измерительного обеспечения аппаратно-программного
комплекса управления объектом на примере смесеприготовительного агрегата (СМПА)
с использованием алгоритма вейвлет-поиска соответствия.
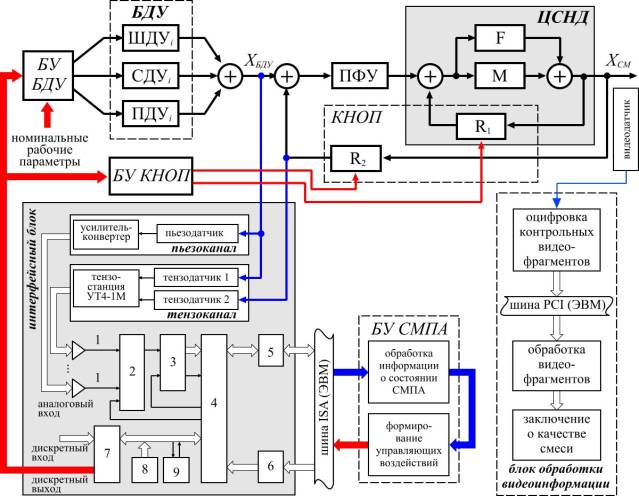
Рис. 1 Схема управляющего
аппаратно-программного мониторингового комплекса
С целью решения задач
оптимизации измерений концентраций и расходов материалопотоков, а также
функционирования смесительного агрегата, был разработан аппаратно-программный
мониторинговый комплекс (АПМК) (рис. 1), сформированный на платформе ПЭВМ IBM
PC PIV-2,8-3,0 ГГц и включающий интерфейсную плату, блок
внешних измерительных преобразователей, модуль фильтрации и интегрированное
программное обеспечение.
На рис. используются следующие обозначения. БДУ – блок дозирующих устройств; ШДУ, СДУ, ПДУ – шнековое, спиральное, порционное дозирующие устройства соответственно; БУ – блок управления; ПФУ – питающе-формирующий узел; КНОП – каналы направленной организации потоков; ЦСНД – центробежный смеситель непрерывного действия; СМПА – смесеприготовительный агрегат; M, F, R1,2 – основной, байпасный, рецикл-каналы соответственно; XБДУ, ХСМ – материалопотоковые сигналы на выходе БДУ и смесителя; 1 – нормирующие усилители; 2 – восьмиканальный коммутатор; 3 – десятиразрядный аналого-цифровой преобразователь (АЦП) с временем преобразования 30 мкс; 4 – параллельный порт; 5 – буфер шины данных; 6 – адресный дешифратор; 7 – блок сопряжения; 8 – блок опорных частот; 9 – схема частотомера.
С интерфейсным блоком аппаратно сопрягается модуль, содержащий два физических измерительных канала для фиксации сигналов на основе пьезоэлектрических (основных) и тензометрических преобразователей.
Контрольное дублирование регистрируемых сигналов производилось тензометрическими датчиками. С целью анализа дисперсных характеристик получаемых композиций сформирован канал обработки видеоинформации.
Использование
в схеме интерфейсного блока 10-разрядного АЦП и восьмиканального коммутатора
позволяет производить программную коммутацию каналов и последовательно снимать
аналоговые отсчеты по любому из аналоговых входов.
С помощью нормирующих усилителей устанавливают диапазон варьирования входного напряжения в пределах ±0,255 В. Разрядность АЦП позволяет снимать аналоговые отсчеты в динамическом диапазоне 60 дБ, погрешность отсчетов не превышает 0,2 %.
Дискретные входные сигналы также нормализуются внешними формирователями до уровней сигналов TTL-логики и поступают через блок сопряжения, параллельный порт с устройством дешифрации адреса и буфер шины данных в ЭВМ. Изменяющиеся во времени дискретные сигналы (частота) измеряются встроенной в плату схемой частотомера, реализованного на ИМС 580ВИ53 и использующего блок опорных частот. Частотомер позволяет измерять частоту / период, длительность импульсов и пауз в диапазоне 0¸2 МГц с постоянной относительной погрешностью измерения 2∙10-6 при времени измерения 1с. Для управления внешними дискретными устройствами на интерфейсной плате реализованы восемь цифровых выходов.
Блок внешних преобразователей включает в себя следующие устройства:
· индуктивный преобразователь – для измерения концентраций смесевых дисперсных материалов, обладающих ферримагнитными, ферромагнитными и парамагнитными свойствами; преобразователь, в частности, включает в себя генератор, формирующий сигнал с частотой, определяемой уровнем концентрации заданного компонента смеси; семейства калибровочных характеристик позволяют определять концентрацию не только однородных веществ, но и сплавных материалов с различным соотношением исходных;
· преобразователь частоты вращения элементов технологических агрегатов на оптоэлектронной основе; измерение параметров вращения и получение результатов производится при помощи встроенного в плату сопряжения цифрового частотомера и соответствующего программного обеспечения;
· измерители интенсивности процесса массопереноса через узлы агрегата на тензометрической и пьезоэлектрической основах; материал, поступающий, из дозирующего устройства, регистрируется датчиком, сигнал которого преобразуется схемой усиления и формирования, после чего воспринимается как аналоговый сигнал платой сопряжения с ЭВМ.
Снимаемые измерительными преобразователями
реальные сигналы процессов смешивания (в частности, сигналы расхода на выходе
устройств непрерывного и дискретного дозирования) представляют собой
нестационарные сигналы. Так, частота сигнала мгновенного расхода материалов в
различных точках смесительного агрегата является время-зависимым параметром,
при этом степень ее варьирования определяется конструктивными особенностями
смесеприготовительного агрегата и режимами его работы. Вейвлет-преобразование
на основе алгоритма поиска соответствия основано на выборе базисных
вейвлет-функций, наилучшим образом соответствующих анализируемым сигналам, из
специализированных баз данных в виде время-частотных тезаурусов.
Практически оптимизация режимов работы
блока дозаторов с каналами рециркуляции осуществляется на основе непрерывно
пересчитываемой время-частотной карты (Вигнера – Вилле [1]) смесеприготовительного
процесса. Карта рассчитывается по результатам разложения анализируемого сигнала
материалопотока на время-частотные атомы (ВЧА) с помощью
вейвлет-преобразования. Задачей системы автоматического управления является
поддержание стабильного коэффициента неоднородности смеси по какому-либо
ингредиенту. Для этого положение ВЧА на карте Вигнера-Вилле в пределах
заданного «окна» поддерживается путем формирования управляющих сигналов СМПА с
последующей их подачей на исполнительные механизмы агрегата.
Так, например, при анализе
функционирования рецикл-каналов (в составе агрегата) уход ВЧА вниз (по карте
Вигнера) говорит о снижении частоты рецикл-импульсов, а также о повышении
расхода в канале рецикла, что увеличивает время приготовления смеси заданного
качества и снижает производительность агрегата.
Основу структуры аппаратно-программного
комплекса составляет плата сопряжения с ПЭВМ. Управление режимами работы СМПА
производится путем подачи непрерывных сигналов и импульсных последовательностей
сигналов. Например, управление частотой вращения двигателями силового привода
производится путем формирования сигналов переменной длительности – средствами
широтно-импульсной модуляции – на цифровых выходах платы сопряжения.
Разработанный мониторинговый управляющий аппаратно-программный комплекс позволяет управлять режимами работы дозирующего оборудования и каналов директивной организации материалопотоков смесеприготовительного агрегата и добиваться определенной сбалансированности суммарного материалопотока (по структуре) на предсмесительной стадии, что значительно улучшает качество смешивания с точки зрения равномерности распределения ингредиентов по объему формируемой конечной композиции.
Подобный подход может быть использован для
управления подвижными объектами, перемещающимися в различных средах, а также
контроля и формирования определенных навигационных показателей (текущего
расстояния, скорости и др.) относительно других подвижных объектов.
Литература
Cohen, L. Time-frequency Analysis / L. Cohen. – Englewoods
Cliffs: Prentice-Hall, 1995.