Технические науки/4.
Транспорт
д.т.н. Сазамбаева Б.Т., к.т.н Киргизбаева Г.Т.
Казахстанский университет «Алатау», Казахстан
К расчету экскаватора
Известно, что экскаватор
динамическая машина, одним из составляющих рабочего цикла которого являются
разгон и торможение поворотной платформы, поэтому минимизация массы элементов
рабочего оборудования и энергоемкость операций представляют актуальную задачу.
Рабочий орган
предлагаемого нами экскаватора сделать несколько независимых движений:
- поворот стрелы
состоящего рабочего органа (ковша), захватывающего устройства относительно
поворотной платформы;
- поворот рукояти ковша
относительно рукояти;
- подъем и опускание
захватывающих устройств относительно рукояти.
В предлагаемом
экскаваторе количество степеней свободы более трех, имеет место
пространственное манипулирование захватывающими устройствами, т.е. захвата
твердотелого объема различной конфигурации.
Упор ковша (при работе с
ковшом) или захватывающих устройств в непреодолимое препятствие может произойти
при различном положении элементов рабочего оборудования.
В зависимости от этого
положения меняются плечи сил, направления действия и их величины.
В результате независимых
движений захватывающих устройств (ЗУ) можно получить бесконечное множество
различных положений в пространстве.
При расчете прочности и
определении напряжений в элементах рабочего органа необходимо учитывать:
- величину и направления
внешних сил;
- положения
захватывающего устройства в пространстве.
При работе с ковшом и
поднятом в нерабочем положении захватывающего устройства основная нагрузка на ковш – это
сопротивление перемещению режущей кромки,
наибольшее значение будет при встрече с препятствиями.
Величина этой нагрузки
зависит от ее направления.
В предлагаемом рабочем
оборудовании экскаватора, рабочее оборудование - многозвенный механизм,
состоящий из нескольких звеньев, совершающих вращательное или поступательное
направление.
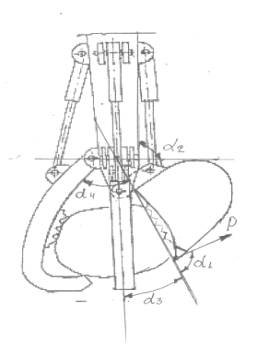
Рисунок 1 – Рабочее
оборудование при подъеме нестандартного штучного груза
Обратная лопата обладает 4-мя степенями свободы
(стрелы, рукояти, ковша, захватывающего устройства) и определяется функциями
угловых координат ![]()
Положение значений
угловых координат соответствует положению вращающегося против часовой стрелки
рабочих органов.
Для силового и
кинематического анализа можно составить матрицу обобщенной координаты любого
шарнира или расчетной точки рабочего оборудования в основной системе координат
OXY совместно с поверхностью поднимаемого груза и осью вращения платформы.
Системы координат
стрелы, рукояти, ковша в локальной области связаны в соответствии с опорными и
соединительными шарнирами. Каждая Ось ![]() повернута
относительно предшествующей системы координат (оси
повернута
относительно предшествующей системы координат (оси ![]() ) соотвественно на угол
) соотвественно на угол ![]() . Перемещение -ой
системы относительно (
. Перемещение -ой
системы относительно (![]() -1)-ой характеризует движение
-1)-ой характеризует движение ![]() -го звена относительно (
-го звена относительно (![]() -1)-го.
-1)-го.
Каждому соединительному
шарниру присвоен номер ![]() , который
, который ![]() .
.
На ковш экскаватора
действует сила
![]() , (1)
, (1)
где ![]() усилие резания
усилие резания
![]() , (2)
, (2)
где ![]() ширина ковша;
ширина ковша; ![]() глубина копания;
глубина копания; ![]() удельное
сопротивление копанию, зависящее от категории грунта.
удельное
сопротивление копанию, зависящее от категории грунта.
![]() =
= (3)
(3)
![]() =
= (4)
(4)
Одна из задач расчета
определение угла ![]() при котором элементы
рабочего оборудования испытывают наибольшие нагрузки, при этом
при котором элементы
рабочего оборудования испытывают наибольшие нагрузки, при этом![]() , то
, то ![]() , это условие не приемлемое.
, это условие не приемлемое.
Из вышесказанного можно
сделать следующие выводы:
1. Рабочее оборудование не
абсолютно жесткая система.
2. Величину силы ![]() ограничивают
устойчивость и другие факторы.
ограничивают
устойчивость и другие факторы.
3. Характеристики
гидроцилиндра влияют на величину реакции препятствию силе ![]() .
.
4. Ограничение силы ![]() зависит от давления
в запертых гидроцилиндрах, которые определяются параметрами насоса или
настройкой предохранительного клапана.
зависит от давления
в запертых гидроцилиндрах, которые определяются параметрами насоса или
настройкой предохранительного клапана.
Литература:
1. Зеленин А.Н. Машины для
земляных работ. М: Машиностроение, 1975.
2. Федоров Д.И. Рабочие
органы землеройных машин. М: Машиностроение, 1990.