Evdokimov A. O.,
Dr. Eng.
Zuev A. V., Dr.
Eng.
Volga State University
of Technology
Yoshkar-Ola,
Russian Federation
THE NAVIGATION SYSTEM OF LAND
VEHICLES ON THE BASIS OF COMPARISON OF DATA FROM GPS SYSTEM AND VISION SYSTEM
Modern navigation equipment is a fusion of satellite positioning system,
a modern radio communications and
electronic mapping, allows to
determine the location and speed of the vehicle, calculate distances, routes and track their adherence to receive information about
cartographic objects.
The current system suggest
that the key elements of the trajectory
(points takeoff, landing,
etc.) are given by the person in advance
and can not be changed if necessary in the operation of the vehicle in the offline mode. The proposed project seeks to address this limitation functionalities of vehicles.
In our project vision system (VS) is capable of
handling both planar (2D), and spatial (3D) images. For modern computer
vision systems is characterized by the transition from two-dimensional
image processing
to the processing of
three-dimensional images. In the proposed system
is supposed to use laser
range finders and cameras that will integrate
the processing of information in the VS. Thus,
the main problem will be getting adequate
mathematical models of 3D images, the
development of methods for their analysis.
As shown in [1,2] will be the most
promising methods of quaternion and
contour analysis, and special mathematical models [1,2]
for the effective and
stable operation even
in the face of a large amount of noise and
loss of signal information. For
greater precision sensors are embedded
in different
climatic conditions, it is known that weather
conditions are making errors in the measurement
of radio navigation [3].
As a result, the proposed system
will perform
an autonomous ground
vehicle navigation through integrated
processing and comparison of navigation data and
VS. Processing algorithms will predict the current location
accuracy, and on this basis to determine the specific
contribution of VS required. In view of the above,
the system will have the form shown in Fig. 1.
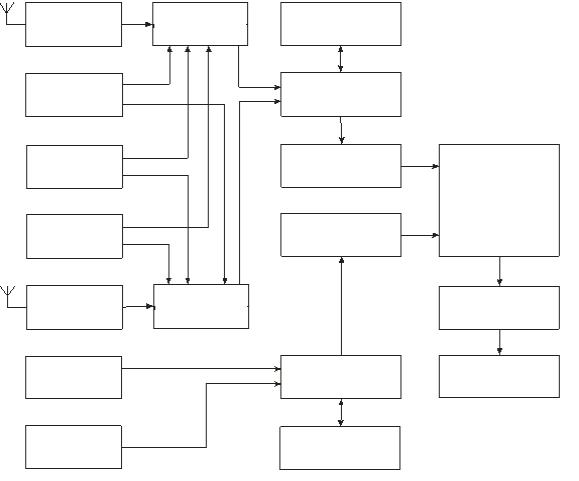
Figure 1 Scheme to correcting the route of the moving the overland transport
facility
The modern complex navigational equipment allows to obtain
data about the location of a moving object, its velocity
and acceleration compare with cartographic information, to determine the point of the route, to take the decision about the
options for further movement. In this case, an
important task is to get the different aggregation
algorithms available
observations in order to determine their effectiveness. According
to the simplest algorithm aggregation provides
for the use of navigation on the output of the
complex coordinates and velocity navigation system with
its normal
operation and autonomous information system when it is inoperable.
The economic impact of
the introduction is provided by reducing the demands
on the hardware systems
for processing 3D images, due to the possibility of reducing the number of operators
who support the
operation of unmanned aerial vehicles, by reducing the risk of failure in
orientation and navigation systems and the
associated losses.
References
1. Furman YA.A. The Visualization of
the scenes in 3D scene. The Textbook. - Yoshkar-Ola, 2007.
2. Evdokimov A.O. Pattern
Recognition of Space Group Point Objects on the Basis of their Shaping Flat
Representations // 8th Open German-Russian Workshop (OGRW-8-2011). Workshop
Proceedings, Nizhni Novgorod - 2011. - P. 56-59.
3.Ivanov V.A.,Ryabova N.V., Zuev
A.V., Kislicyn A. A., Wing S. V. Study of the influence upon noise-immunity
radio navigation signal meteo condition and cosmic weather // Vestnik MARGTU.-
Yoshkar-Ola: Mari state technical university, 2011.- 3. - P. 25-35.