Андреев
М.А.
МИЭМ
НИУ ВШЭ г.Москва
Применение
индукционных датчиков расстояния для позиционирования автономных
рентгенографических комплексов
В настоящее время в России
протяженность магистральных трубопроводов составляет более 250 тыс. км, а
промысловых около 400 тыс. км. Трубопроводы должны обладать высокой
надежностью, так как аварии на них могут привести к экологической катастрофе и
загрязнению окружающей среды. Одной из основных причин аварий являются дефекты
сварных соединений. Поэтому при строительстве новых трубопроводов необходим полный
контроль качества сварных соединений, а также периодический инспекционный
контроль действующих трубопроводов.
Так как наиболее используемым
способом контроля является рентгенографический метод, который обладает наглядностью,
высокой чувствительностью и документальностью, для неразрушающего контроля
сварных швов в процессе строительства широко применяются специальные
устройства, называемые кроулерами, на которых в большинстве случаев установлены
панорамные рентгеновские генераторы. Они используются при строительстве
магистральных трубопроводов, как на суше, так и при прокладке газовых труб по
дну моря.
Сложность управления
самоходным кроулером в трубопроводах заключается в необходимости передачи
команды на остановку в определенном месте через стенку стальной трубы толщиной
от 8 до 40 мм на расстоянии до открытого конца трубы до 3 км, что исключает
использование радиопередатчиков и некоторых других способов передачи команд.
В данной работе предлагается
метод позиционирования рентгенографического комплекса относительно
контролируемого сварного шва с помощью индукционного датчика расстояния.
Предлагается использовать индукционный
датчик расстояния с выходом аналогово типа. Данные датчики позволяют измерять
расстояние до металла с точностью до 1мм и определять различные проводящие
материалы на основе различной магнитной плотности материалов.
Сварной шов трубопровода по
нормативам всегда имеет «обратный валик» т.е. выступает от внутренней
поверхности на 3-5 мм. Также сварной шов имеет другую плотность материала, чем
трубопровод. Таким образом для позиционирования рентгенографического кроулера
можно использовать индукционный датчик расстояния.
Индукционный датчик
расстояния устанавливается вблизи фокусного пятна рентгеновского генератора
таким образом чтобы при проведении контроля сварного шва на рентгеновской
пленке этот датчик не был виден. Датчик устанавливается на расстоянии 5-7 см от
плоскости излучения, и направлен под углом, таким образом чтобы определять
наличие сварного шва точно в плоскости излучения.
При движении кроулера в
прямом направлении индукционный датчик измеряет расстояние до стенки
трубопровода, и как только датчик определяет наличие сварного шва (на выходе
датчика устанавливается устройство, фильтрующее все возмущения кроме сигнала
соответствующего наличию сварного шва), то кроулер замедляет движение и
останавливается, и после этого медленно возвращается обратно пока не остановится
точно над сварным швом.
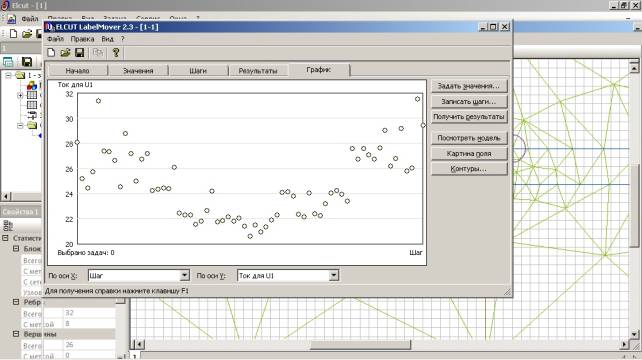
Для моделирования работы
такой системы позиционирования можно использовать программный продукт,
позволяющий рассчитывать электромагнитные поля. Например, такой программой
является ElCut. Так
например, при использовании простейшего индукционного датчика для решения
данной задачи в бесплатной версии ElCut можно получить следующее изменение выходного параметра в
зависимости от расположения датчика относительно сварного шва:
При данной системе
позиционирования нет необходимости использовать для управления электромагнитную
систему и для управления кроулером предлагается использовать радиоуправление,
так как необходимая точность позиционирования будет получена при использовании индукционного
датчика.
Предлагаемая система
управления имеет ряд достоинств. Так нет необходимости находиться в
непосредственной близости от места рентгенографического контроля, что позволяет
снизить рентгеновскую нагрузку на организм оператора. Также управление такой
системой легче и понятнее, и не требует дополнительного обучения. С помощью
радиосвязи появляется возможность использовать двунаправленный канал связи и
таким образом возможность считывать информацию о состоянии рентгенографического
комплекса.
Данная система повысит
надежность используемых рентгенографических комплексов и также упростит их с
точки зрения управления оператором. И как самое важное достоинство – повысит
безопасность работы с данным оборудованием.