1. Бушуев Александр Борисович,
к.т.н.,
доцент кафедры Систем Управления
и Информатики НИУ ИТМО ,
С-Петербург, Россия.
2. Литвинов
Юрий Володарович, к.т.н., доцент кафедры Систем Управления и
Информатики НИУ ИТМО , С-Петербург, Россия.
3.
Мазулина Вероника Васильевна, студентка
4 курса кафедры Систем Управления и Информатики НИУ ИТМО, С-Петербург, Россия
4 Салмыгин Игорь Петрович тьютор кафедры
Систем Управления и
Информатики
НИУ ИТМО.С-Петербург Россия
5. Фролов
Станислав Николаевич, студент 4 курса кафедры Систем Управления и
Информатики НИУ ИТМО , С-Петербург, Россия
Бушуев А.Б.,Литвинов Ю.В.,Мазулина
В.В.,Салмыгин И.П.,Фролов С.Н.
Санкт-Петербург,
НИУ ИТМО
Использование веб-камеры для обнаружения
препятствия на пути движения мобильного робота
При
создании мобильных роботов весьма существенная роль среди возможных средств
очувствления отводится системам технического зрения (СТЗ), обеспечивающим
восприятие видеоинформации об окружающей среде, автоматическую обработку и
анализ изображений рабочих сцен в целях формирования команд управления роботом
в процессе его работы.[1]
Мобильные
роботы, снабженные СТЗ, выполняют характерные для робототехники
функциональные задачи, такие, как: обнаружение наличия объекта, измерение
расстояния до объекта, определение физических характеристик излучения от
объекта, подсчет числа объектов и др.[2]
После
построения мобильного робота (см. [3]) и выбора дальнейшей его задачи
(автономное сканирование местности на наличие какого-либо предмета) перед нами
встала главная проблема автономности робота-это объезд препятствий роботом.
Из-за ограниченности бюджета выбор способа определения препятствия ограничился 2способами:
с помощью веб-камеры и с помощью ультразвуковых датчиков. Так как веб-камера позволяет
передавать информацию о том, что видит
робот, то было принято решение попробовать использовать камеру и для
определения наличия препятствий на пути
следования робота..
В нашем мобильном роботе используется wi-fi роутер,
который был перепрошит альтернативной прошивкой. Эта операция дала доступ к установке любых пакетов (получился
этакий маломощный ПК на ОС Linux.
Камера по usb
подключена к роутеру, а роутер по wi-fi передает
изображение на компьютер. Так как роутер кроме того, что передает видеопоток на
компьютер, еще и получает команды с компьютера для дальнейшей их передачи на
микропроцессор, перед нами возник вопрос о загрузке процессора роутера. Поэтому
требовалось найти оптимальное соотношение качества видеопотока и загрузки процессора. Для этого мы меняли количество кадров в секунду (FPS). При уменьшении FPS уменьшается нагрузка на процессор
роутера и повышается задержка в отображении видео на компьютере - это логично.
Но, если поставить частоту кадров в пределах от 5 до 12, то при приближении к
препятствию (уменьшении освещенности), на камере появлялись помехи. Этот эффект
и было решено использовать для обнаружения препятствия и определения расстояния
до него. Нагрузка на процессор при такой частоте составляла 5-10%. При частоте
кадров 24 нагрузка была 50% и никаких помех не наблюдалось. Следовательно,
процессор роутера вполне нормально справлялся с видеопотоком. Эта особенность работы связки «камера-роутер» позволила использовать ее для определения наличия
препятствия перед роботом.

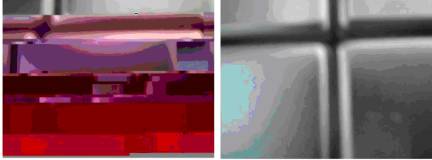
а)
при 10 кадрах/сек, б)
при 24 кадрах/сек
Рисунок
1. При большом удалении от препятствия

а)
при 10 кадрах/сек, б)
при 24 кадрах/сек
Рисунок
2. При расстоянии от препятствия 15-20 см
а)
при 10 кадрах/сек, б) при
24 кадрах/сек
Рисунок
3. При расположении камеры вплотную к препятствию
Почти
у каждого метода есть свои недостатки. И наш оказался не исключением. Главным
недостатком является то, что если препятствием будет какой-либо тонкий и
длинный объект, стоящий вертикально, то помехи начнутся только тогда, когда
робот впритык подъедет к препятствию. Еще одним недостатком можно назвать
нестабильную работу камеры (иногда могут проскакивать помехи даже на высокой
частоте кадров, но это бывает довольно редко). В связи с перечисленными выше
недостатками предполагается дополнить робот ультразвуковым датчиком для
лучшего распознавания препятствий.
Распознавание помех будет происходить с
помощью программного обеспечения ROS
(Robot
Operation
System)
и операционной системы Linux,
чем мы собственно сейчас и занимаемся.
1
Техническое
зрение роботов. Б. И. Мошкин, А. А. Петров, В. С. Титов. Ю. Г. Якушенков; Под
общ. ред. Ю. Г. Якушенкова. —M.: Машиностроение, 1990. —272 с.: ил. ISBiV
5-217-00467-3
2 Пью А. Техническое зрение роботов. –М.: Машиностроение,1987.-320с.
Пер. с англ.
3 Бушуев А.Б.,Литвинов Ю.В.,Мазулина
В.В., Фролов С.Н..Организация программного движения мобильного робота при
обходе препятствий. // Сб. м-ов МЗНПК «Современные тенденции в
образовании и науке», Т7, Тамбов,2013