Робастный
подход в задаче удержания судна на траектории
Имангазиева А.В.
Астраханский государственный технический
университет.
Одним из эффективных подходов, учитывающих
неопределенность параметров объекта и наличие возмущающих факторов, вызванных
внешними условиями, является робастное управление, предложенное в работах [1,2].
На основе этих структур управления предложено решение задачи стабилизации угла рыскания судна с учетом
бокового отклонения на заданной траектории.
При синтезе управления использовалась математическая
модель судна [3]
![]() , (1)
, (1)
где ![]() матрица динамики, учитывающая линейные члены,
матрица динамики, учитывающая линейные члены, ![]() вектор нелинейных членов,
вектор нелинейных членов, ![]() матрица управления,
матрица управления, ![]() векторный белошумный процесс единичной интенсивности,
векторный белошумный процесс единичной интенсивности, ![]() матрица возмущений.
матрица возмущений.
В вектор состояния ![]() при стабилизации
судна на траектории включены боковая относительная скорость движения судна
при стабилизации
судна на траектории включены боковая относительная скорость движения судна ![]() , угловая скорость рыскания
, угловая скорость рыскания ![]() , боковое отклонение от траектории
, боковое отклонение от траектории ![]() , угол рыскания
, угол рыскания ![]() , приведенные сила
, приведенные сила ![]() и момент
и момент ![]() ветрового
воздействия. В модели
ветрового
воздействия. В модели ![]() вектор возмущений, где
вектор возмущений, где ![]() независимые, порождающие белые шумы единичной интенсивности,
независимые, порождающие белые шумы единичной интенсивности, ![]() угол волнового склона.
угол волнового склона.
Управление ![]() угол перекладки руля, выход -
угол перекладки руля, выход - ![]() угол курса судна,
угол курса судна, ![]() курсовой угол участка траектории,
курсовой угол участка траектории, ![]() угол рыскания.
угол рыскания.
Целью управления является построение системы с
эталонным сигналом, обеспечивающее выполнение целевого условия
![]() , (2)
, (2)
начиная с некоторого момента времени Т, где ![]() некоторое достаточно малое число.
некоторое достаточно малое число.
Синтезированная система управления курсом судна
исследована в MATLAB Simulink. На рис.1, рис.2 представлены переходные процессы
по ошибке слежения ![]() [рад], боковому
отклонению
[рад], боковому
отклонению ![]() и управляющему
воздействию
и управляющему
воздействию ![]() [рад] для значений
«наихудшей» матрицы динамики, полученные в режиме маневрирования.
[рад] для значений
«наихудшей» матрицы динамики, полученные в режиме маневрирования.
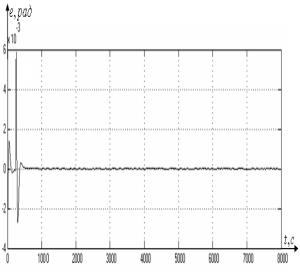
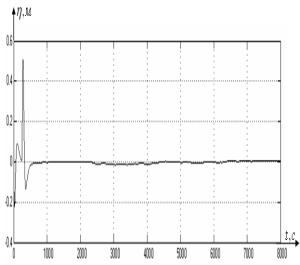
Рис.1.
Переходные процессы по ошибке слежения и боковому отклонению
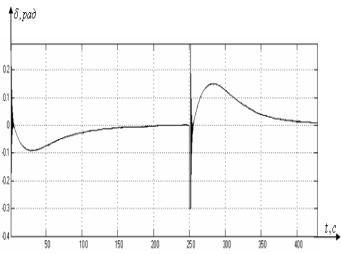
Рис.2. Переходной процесс по
управляющему воздействию
Результаты моделирования показали эффективность
полученного в работе алгоритмического обеспечения. Достоинством примененной
схемы является тот факт, что для траектории (в данном случае состоящей из двух
прямолинейных участков) она обеспечивает достижимость цели управления (2) при
боковом отклонении 0,05 метров. Важно отметить, что в момент времени ![]() происходит перекладка
руля для поворота судна на второй прямолинейный участок траектории, поэтому
боковое отклонение принимает значение 1,1 метр.
происходит перекладка
руля для поворота судна на второй прямолинейный участок траектории, поэтому
боковое отклонение принимает значение 1,1 метр.
Литература
1. Имангазиева
А.В., Цыкунов А.М. Робастное управление линейным
динамическим объектом с запаздыванием по состоянию. // Мехатроника,
автоматизация, управление. 2007. – № 12. С.2-6.
2. Имангазиева
А.В. Робастная система автоматического
управления с компенсацией запаздывания в условиях нестационарности. // Вестн.
Астраханского гос. техн. ун-та. Сер.: Управление, вычислительная техника и информатика.
– 2011. – №2. – С. 30-36.
3. Дмитриев
С.П., Пелевин А.Е. Задачи
навигации и управления при стабилизации судна на траектории. - СПб.: ГНЦ
РФ-ЦНИИ «Электроприбор», 2004.-160 с.