Любимова А.А.,
студентка ЮУрГУ г. Златоуст
Управление
трехфазным двухуровневым инвертором напряжения методом векторной
широтно-импульсной модуляции
Современная промышленность просто
не может обойтись без широкого применения электроприводов в различных отраслях.
Одной из приоритетных задач современности является формирование управляющей
последовательности, обеспечивающей плавное изменение выходных напряжений при
смене периодов повторяемости работы привода, что обеспечит максимально
возможное КПД двигателя, увеличит срок его службы, минимизирует потери и
принесет наибольшую выгоду.
Анализ тенденций развития
автоматизированного электропривода позволяет отметить, что: неуклонно снижается доля систем электропривода
с двигателями постоянного тока и увеличивается доля систем с двигателями
переменного тока; наиболее распространенными сейчас являются асинхронные
двигатели. В связи с удешевлением статических преобразователей частоты (ПЧ),
доля частотно - регулируемых асинхронных электроприводов (например: управляемых
ПЧ (рис.1) на IGBT транзисторах) быстро увеличивается.
Рисунок 1. Функциональная схема ПЧ с автономным
инвертором:
ФП - функциональный преобразователь, формирующий напряжение Ud или ток Id
двигателя; УИ - управляемый источник соответственного напряжения УИН или тока
УИТ; СУИ - система управления инвертором, где входные величины напряжения, тока
и частоты (Un, In, fn) управляются каналом частоты; АИ –
автономный инвертор со входными значениями Ud и Id.
Данный ПЧ содержит каскад трехфазного двухуровневого
автономного инвертора с шестью транзисторами на обратных диодах (рис. 2).
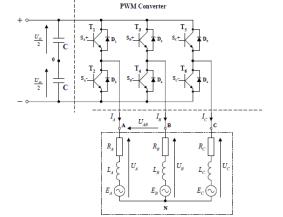
Рисунок
2. Схема трехфазного инвертора
В настоящее время известно большое число различных
способов управления силовыми ключами (транзисторами) инвертора. Наиболее часто
используют специальные математические модели для реализации метода
широтно-импульсной модуляции (ШИМ), который позволяет формировать в каждой из
обмоток двигателя необходимое напряжение и ток.
Более
выигрышным является метод векторной ШИМ, позволяющий производить коммутацию
между несколькими, заранее выбранными состояниями инвертора, каждое из которых
соответствует определенному пространственному положению базового вектора
напряжения (рис. 3).
Формирование вектора с заданным средним
значениям модуля и пространственного угла производится поочередным переключением
базовых векторов, образующих границы сектора, в котором находится
результирующий вектор, и нулевого вектора (рис. 4).

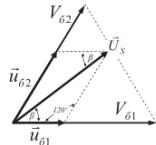
Рисунок 3. Базовые векторы напряжения Рисунок 4. Формирование вектора
Величины
базовых составляющих вектора легко находятся по теореме синусов. Временные
интервалы (tб1, tб2, t0), во время которых происходит переключение базовых
векторов, высчитываются по формулам (1):
 (1)
(1)
где tШИМ – период ШИМ в секундах, Ud – напряжение двигателя.
Далее нужно для каждой фазы вычислить время ее подключения к
+Ud в периоде ШИМ (T+A, T+B и T+C).
Введем
три промежуточные переменные (2):
![]() (2)
(2)
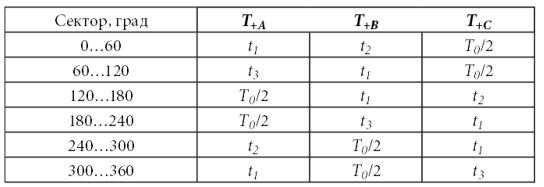
Значения T+A, T+B и T+C определяются значением переменных t1, t2, t3
и зависят от сектора угла так, как показано в таблице 1.
Таблица
1.
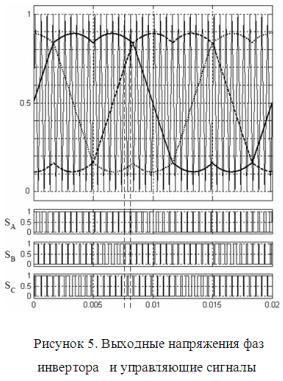
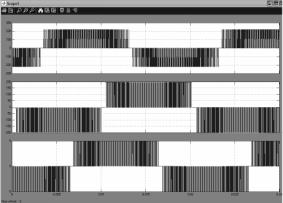
С помощью таблицы получаем комбинированные
синусоидальные выходные напряжения фаз, которые при пересечении с опорным значением напряжения должны дать
управляющие сигналы на группы транзисторов инвертора (рис.5). Форма кривой
выходного напряжения будет представлять
собой высокочастотную двухполярную последовательность прямоугольных импульсов. Форма
выходного тока должна получиться практически синусоидальной.
Для
реализации поставленной задачи была разработана и собрана модель (рис. 6) в
среде Matlab с использованием блоков библиотек Simulink и
SimPowerSystems.
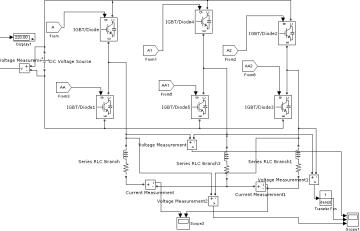
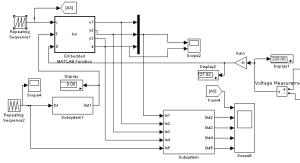
Рисунок 6. Модель для получения трехфазного напряжения из однофазного
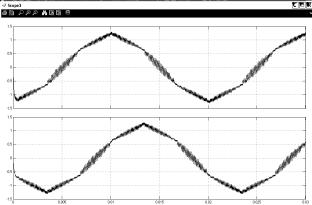 При напряжении двигателя 400
В, индуктивности 9 мГн и сопротивлении 100 Ом мы получим следующие графики
выходных токов (рис. 7) и фазных напряжений (рис. 8).
При напряжении двигателя 400
В, индуктивности 9 мГн и сопротивлении 100 Ом мы получим следующие графики
выходных токов (рис. 7) и фазных напряжений (рис. 8).
Рисунок 7. График выходных токов Рисунок 8. График выходных
напряжений
Как видно, токи не имеют идеального синусоидального вида. Пульсации можно минимизировать путем уменьшения периода пилообразного опорного напряжения, либо установкой специальных сглаживающих фильтров.
Разработанная модель выполняет роль лабораторного стенда,
позволяющего без лишних затрат задавать и исследовать любые режимы работы и
характеристики системы.