ТЕХНИЧЕСКИЕ
НАУКИ / 12.Автоматизированные системы управления на производстве
Литвиненко
С.В., Суков С.Ф.
Донецкий
Национальный Технический Университет
Построения системы автоматического
управления на основе стохастической дискретизации
На данном этапе развития технического
прогресса и электронной техники в частности, большинство современных систем
автоматического управления строится на базе микропроцессорной техники.
Вопросы сопряжения средств системы
автоматического управления с объектом управления посредством аналого-цифровых и
цифро-аналоговых преобразователей определяют работоспособность системы в целом,
также как выбор закона управления и правильность разработки математического и
программного обеспечения [4].
Ввиду того, что большинство САУ – это цифровые
системы, аналоговые сигналы, участвующие в процессе управления (все или
частично) должны быть преобразованы и представлены в цифровой форме, для
последующей обработки вычислительным устройством. Это преобразование сигналов,
на данный момент, практически повсеместно производится в соответствии с
принципами равномерного преобразования (англ.: digital signal processing - DSP). Данный подход к дискретизации обладает своими
достоинствами и недостатками, в частности, одной из проблем является возникновения
побочных частотных составляющих (англ.: alias) в сигнале при проведении равномерной дискретизации. Применение
мер по подавлению побочных частотных составляющих применительно к САУ приводит
к [3]:
- искажениям управляющего воздействия,
обусловленное неидеальностью характеристик применяемых фильтров;
- фазовому сдвигу сигналов и, как
следствие – к увеличению запаздывания реакции САУ;
- потере части информации сигнала.
Простейшие фильтры, применяемые в САУ не обеспечивают адаптацию к сигналу,
применение же цифровых адаптивных фильтров может сказаться на быстродействии
системы;
- искажению частотных характеристик
системы.
Все это в некоторых случаях может быть
критично для процесса управления.
Для устранения «первопричины» эффекта
побочных частотных составляющих активно разрабатывается новый принцип
преобразования сигналов в цифровую форму – стохасический (англ.: digital alias-free
signal processing - DASP) [1, 2]. Одним из преимуществ данного метода является
устранения имеющихся недостатков у равномерного принципа и всех операций с ними
связанных (предфильтрация, антиалиазинговые фильтры, передискретизаци и пр.),
несущих в проект затраты и трудности той или иной формы [1, 2, 3]. Сущность
стохастического метода дискретизации заключается во взятии значений отсчетов
сигнала в заранее неизвестные случайные моменты времени. При таком подходе
основными параметрами дискретизации сигнала становятся математическое ожидание,
СКО и закон распределения случайной величины интервала дискретизации.
Как известно, почти все объекты управления
можно описать при помощи типовых звеньев. Также существует набор типовых
законов регулирования, которые позволяют производить управление большинством
типовых объектов [4]. В данной работе будет построена САУ с ПИ-регулятором на
основе стохастической дискретизации.
ПИ-закон управления применяется для
объектов управления, описываемых с помощью следующей передаточной функции:
![]()
Это апериодическое звено первого порядка с
чистым запаздыванием. Учитывая специфику выполняемой работы, пренебрегаем
запаздыванием, тогда передаточная функция примет вид:
![]()
Классический вид ПИ-закона регулирования:
Произведем перевод аналогового закона
регулирования в цифровой. Заменяем интеграл с помощью численного интегрирования
(формула прямоугольников) и рассматриваем значения в дискретные моменты
времени:
Выражение, описывающее ПИ-регулятор в
цифровой форме:
![]()
Для нахождения управления на текущем шаге Du, вычтем из u(n) u(n-1), получим:

Управляющее воздействие на объект
управления в текущий момент времени будет иметь вид:
![]()
После чего составим структурную схему системы
управления:


Рисунок 1 – Модель системы
В качестве тестового
сигнала, выбрана синусоида с амплитудой 1024 В и частотой 10 Гц. Время
моделирования – 2 с. При этом исходный сигнал будет представлен 512 отсчетами в
секунду. Выбор синусоиды в качестве тестового сигнала обеспечен простотой и
наглядностью ее спектральных характеристик. Поскольку каждый сигнал можно
разложить на совокупность гармоник, например с помощью преобразования Фурье, то
дальнейшее изложение справедливо для любых аналоговых сигналов.
Произведем моделирование реакции
исследуемой системы при частоте дискретизации fd = 32 Гц.
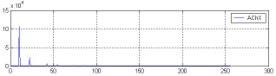
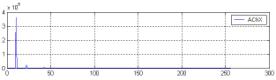
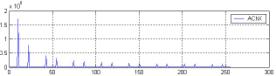
Рисунок 2 – Спектры выхода, ошибки и
управляющего воздействия системы при равномерной дискретизации.
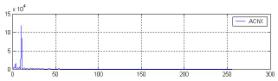
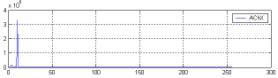
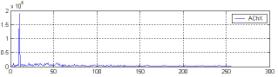
Рисунок 3 – Выход, ошибка и управляющее
воздействие при стохастической дискретизации.
Проводя анализ полученных результатов,
можно сделать вывод:
- если рассмотреть спектр управляющего
воздействия и выходного сигнала при равномерной дискретизации, то можно
заметить появившиеся побочные составляющие, амплитуда которых соизмерима с
амплитудой полезного сигнала;
- спектры сигналов системы при стохастической
дискретизации содержат лишь широкополосный шум низкой амплитуды.
Выводы:
- применение равномерной
дискретизации предпочтительнее для объектов: не критичных к быстродействию САУ;
влиянием фильтров на процесс управления можно пренебречь; методы
предварительной обработки и постобработки сигналов при равномерной
дискретизации не влияют на процесс управления;
- применение стохастической дискретизации целесообразно,
когда все вышеизложенное в предыдущем пункте критично для САУ. Также возможно
ее применение там, где невозможно провести предфильтрацию при
аналогово-цифровом преобразовании сигнала или когда обрабатываемый сигнал
содержит информационные компоненты в частотах, превышающих половину принятой
(либо допустимой в данном случае) частоты дискретизации;
- преднамеренное введение элемента
случайности позволяет получить более гибкую систему обработки сигналов.
Свойства неравномерно дискретизированных сигналов главным образом определяются
режимом генерации последовательности импульсов, используемых при выборке.
Перечень ссылок
1. DASP
Application Note AN1.Nonuniform sampling. September 2001.
2. DASP
Application Note AN2. Randomized quantization. September 2001.
3. Артамонов
Г.Т., Тюрин В.Д. Анализ информационно-управляющих систем со случайным
интервалом квантования сигнала по времени. – М.: Энергия, 1977. – 112с.
4. Г. Олссон, Д. Пиани. Цифровые системы
автоматизации и управления – СПб.: Невский Диалект, 2001г. – 557 с.