Гурвич Ю.А., Лебедев Е.П.
Белорусский национальный технический
университет, Минск
Экспериментальная установка для испытания шин
Установка обеспечивает вращающемуся колесу
с шиной боковые (вдоль оси вращения колеса) и угловые (относительно
вертикальной оси) с регулируемой амплитудой, практически, гармонические
колебания с периодом, равным 4,4 с. Допускается регулирование амплитуды
колебаний, варьирование путевой частоты (от значений близких к нулю и до
бесконечности) и нормальной нагрузки. Плоскость колеса может поворачиваться на
различные углы увода (от 0 до 35°). С помощью пространственно-стержневой
системы тензоблока осуществляется измерение силовых и моментных составляющих
реакций, действующих на колесо со стороны дороги.
Установка состоит из следующих механизмов,
узлов и деталей (рис. 1).
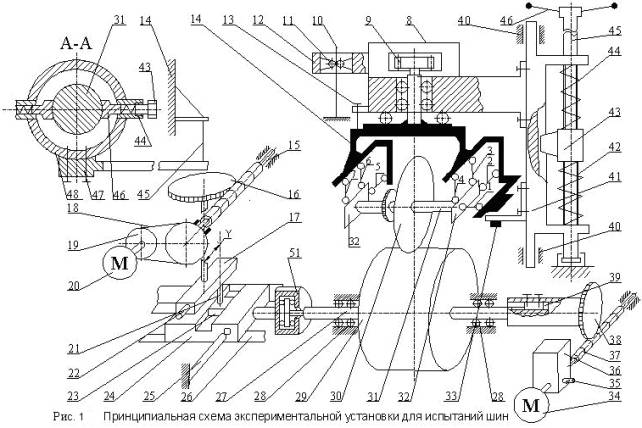
Механизм вертикального нагружения колеса
содержит штурвал 46, винт 45, гайку со шпонкой 43, входящей в вертикальный паз
каретки 41. При вращении винта гайка поступательно перемещается вдоль винта.
Усиление через пружины 42 и 44, каретку, вилку 14 и жестко связанную с ней
пространственно-стержневую систему тензоблока передается на колесо.
Механизм варьирования путевой частоты
имеет в составе двигатель постоянного тока с регулируемой угловой скоростью
вращения 34, двухступенчатую коробку скоростей 36, червячный редуктор 37, муфту
38 со шпонкой 39, жестко соединенную с червячным колесом. Барабан 29 состоит из
вала 27, двух специальных подшипников 28, обеспечивающих два движения барабану
− поступательное и вращательное, шариковой муфты 51.
Осциллятор создает гармоническое (с
периодом равным 4,4 с) поступательное перемещение барабану и вращательное вилке
14, Состоит из двигателя переменного тока с постоянной угловой скоростью
вращения, клиноременной передачи 18-19, червячного редуктора 15-16, кривошипа
17, сухаря 23, ползуна 24. Ход ползуна (амплитуда осциллятора) регулируется до
40 мм. При вращении винта 22 ось пальца 21 сдвигается на величину ![]() относительно оси
червячного колеса 16 и кривошипа 17. К ползуну осциллятора 24 крепится рейка,
которая выполняет двойную функцию - служит направляющей ползуна при движении
его относительно корпуса осциллятора 26 и вращает шестерню 9, вилку 14 и колесо
с шиной 30, если осциллятор переставить в положение 8, чтобы рейка вошла в зацепление
с шестерней 9.
относительно оси
червячного колеса 16 и кривошипа 17. К ползуну осциллятора 24 крепится рейка,
которая выполняет двойную функцию - служит направляющей ползуна при движении
его относительно корпуса осциллятора 26 и вращает шестерню 9, вилку 14 и колесо
с шиной 30, если осциллятор переставить в положение 8, чтобы рейка вошла в зацепление
с шестерней 9.
Вилка 14 представляет собой жесткую
конструкцию, вращающуюся в подшипниках каретки 41. Фиксация ее осуществляется
винтами 13 и 33.
В результате специальных экспериментов для
каждого типа шин можно определить диапазоны амплитуд боковых колебаний у0,
внутренних давлений в шине р и действующих на нее нормальных нагрузок G, при
которых скольжением пятна контакта колеса относительно дороги можно пренебречь.
Варьирование путевой частоты в этом случае осуществляется за счет линейной
скорости центра колеса при постоянном периоде, равном 4,4 с.
На искомые величины Cl, (![]() ) накладываются
ограничения в виде неравенств
) накладываются
ограничения в виде неравенств
0![]() C1
C1![]() C1max , 0
C1max , 0![]() C2
C2![]() C2max, C3min
C2max, C3min![]() C3
C3![]() C3max , C4min
C3max , C4min![]() C4
C4![]() C4max.
(1)
C4max.
(1)
Значения C3,4min, C3,4max определяются соответственно из экспериментальных
амплитудных характеристик боковой силы и стабилизирующего момента.
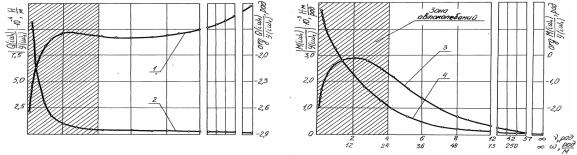
Рис.2. Экспериментальные данные по шинам: амплитудные частотные (1,3) и фазовые частотные (2,4) характеристики
боковой силы и стабилизирующего момента при боковых колебаниях шины
5,00-10 (G =4
кН, p=0,24 МПа, у0=2,5 · 10-2 м ).
ЛИТЕРАТУРА
1. Неймарк Ю.И., Фуфаев
Н.А. Динамика неголономных систем. — М.: Наука, 1967.— 519 с.
2. Бесекерский В.А.,
Попов Е.П. Теория систем автоматического регулирования.— М.: Наука, 1975.— 767
с.