Багаев Андрей
Алексеевич, д.т.н., профессор, зав. каф. ЭиАСХ Алтайский государственный аграрный университет
Чернусь Роман
Сергеевич ассистент кафедры ЭиАСХ Алтайский государственный аграрный
университет
АЛГОРИТМ ИДЕНТИФИКАЦИИ РАЦИОНАЛЬНОЙ
ОБЛАСТИ РАСПОЛОЖЕНИЯ ПОЛЮСОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ЦЕНТРОБЕЖНОГО РАСХОДОМЕРА
СЫПУЧИХ МАТЕРИАЛОВ
НА S–ПЛОСКОСТИ
Устройство и принцип действия центробежного
расходомера представлены в работе [1].
В работе [2] получена передаточная функция
центробежного расходомера сыпучих сельскохозяйственных материалов по току
приводного двигателя
![]() , (1)
, (1)
где![]() - безразмерный
коэффициент затухания.
- безразмерный
коэффициент затухания.
Связь
между параметрами электропривода и колебательного звена имеет следующий вид [3]:
![]() ;
; ![]() ;
; ![]() .
(2)
.
(2)
В
выражениях (1) и (2) использованы следующие обозначения:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
;  ;
; ![]() ;
; ![]() ;
;
![]() ,
,
где ![]() - электромагнитная
постоянная времени двигателя; β
– жесткость механической характеристики двигателя;
- электромагнитная
постоянная времени двигателя; β
– жесткость механической характеристики двигателя; ![]() - номинальная угловая частота вращения двигателя в режиме
холостого хода; s
– скольжение;
- номинальная угловая частота вращения двигателя в режиме
холостого хода; s
– скольжение; ![]() -момент сопротивления; Q - расход сыпучего продукта; i -передаточное число редуктора; R2 – активное сопротивление ротора; U1 – фазное
напряжение; xk – индуктивное сопротивление короткого замыкания статора; I10 – ток
статора; J�� –момент инерции вращающихся масс, приведенный к валу
двигателя; ω2 –
угловая скорость вращения крыльчатки.
-момент сопротивления; Q - расход сыпучего продукта; i -передаточное число редуктора; R2 – активное сопротивление ротора; U1 – фазное
напряжение; xk – индуктивное сопротивление короткого замыкания статора; I10 – ток
статора; J�� –момент инерции вращающихся масс, приведенный к валу
двигателя; ω2 –
угловая скорость вращения крыльчатки.
Известно
[3], что значение безразмерного коэффициента затухания![]() , выраженное через параметры двигателя, нагрузки и
механической передачи, определяет степень колебательности электропривода
центробежного расходомера. Коэффициент затухания
, выраженное через параметры двигателя, нагрузки и
механической передачи, определяет степень колебательности электропривода
центробежного расходомера. Коэффициент затухания![]() может принимать отрицательные действительные или
комплексно-сопряженные значения, что определяет общий вид временных
характеристик переходного процесса устройства.
может принимать отрицательные действительные или
комплексно-сопряженные значения, что определяет общий вид временных
характеристик переходного процесса устройства.
В свою очередь, на показатели качества
переходных процессов оказывают влияние механические и электромагнитные
инерционности привода, оценивающиеся соответствующими постоянными времени. Для
обеспечения быстродействия и точности измерений расхода необходимо
оптимизировать переходные процессы во время действия переменной случайной
нагрузки, т.е. по существу необходимо определить требуемую область расположения
полюсов передаточной функции расходомера на комплексной S-плоскости.
В связи с этим целью работы является формулирование требований к временным
характеристикам и обоснование области расположения полюсов передаточной функции
расходомера на комплексной S-плоскости.
Переходная функция характеризуется рядом
показателей, одним из которых является максимальное
относительное перерегулирование [4]:

 , (3)
, (3)
где iуст – установившееся
значение тока; ![]() – максимальное
значение тока;
α – угол между отрицательной
осью комплексной плоскости и линией, ограничивающей область расположения
полюсов передаточной функции.
– максимальное
значение тока;
α – угол между отрицательной
осью комплексной плоскости и линией, ограничивающей область расположения
полюсов передаточной функции.
В теории электропривода [3] принято, что
колебательный процесс должен затухать за один период, а перерегулирование не
должно превышать 5%, что соответствует «модульному оптимуму», условием которого
является равенство ![]()
Другим показателем качества переходного процесса
является время установления Туст..
Туст –это время,
необходимое для того, чтобы выходной сигнал вошел в ±2- или ±5-процентную зону,
прилегающую к установившемуся значению. Для систем второго порядка переходная
функция входит в 2-процентную область как правило за четыре постоянных времени ![]() , где
, где ![]() -собственная частота колебаний, т.е.
-собственная частота колебаний, т.е.![]() , где k =4.
, где k =4.
Параметры
переходной функции второго порядка непосредственно связаны с расположением
полюсов (корней) передаточной функции вида (1). Для нахождения области
расположения полюсов преобразуем (1), разделив числитель и знаменатель правой
части на ![]() и обозначив
и обозначив ![]() ,
, ![]() получим
получим
![]() . (4)
. (4)
Комплексные
сопряженные корни знаменателя (4) ![]() являются полюсами передаточной функции.
являются полюсами передаточной функции.
Время
установления ![]() обратно
пропорционально действительной составляющей корней (полюсов) передаточной
функции. Если требуется, чтобы время установления было меньше или равно
некоторому предельному значению
обратно
пропорционально действительной составляющей корней (полюсов) передаточной
функции. Если требуется, чтобы время установления было меньше или равно
некоторому предельному значению ![]() , то должно выполняться следующее условие
, то должно выполняться следующее условие ![]() и полюсы должны
располагаться в определенной области.
и полюсы должны
располагаться в определенной области.
Пример.
Пусть максимальное перерегулирование не должно превышать 4%, что согласно
выражению (3) соответствует коэффициенту затухания ξ = 0,716 и α=arctg
0,98=49,390.
Предположим
также, что максимальное допустимое время установления ![]() =1 с. В этом случае τ=1/
=1 с. В этом случае τ=1/![]() ≤1 и
≤1 и ![]() .
.
Следовательно,
область расположения полюсов недодемпфированной системы второго порядка
ограничена заштрихованной областью на рисунке 1. Полюсы, соответствующие
заданным ограничениям, имеют значения ![]() 0,973.
0,973.
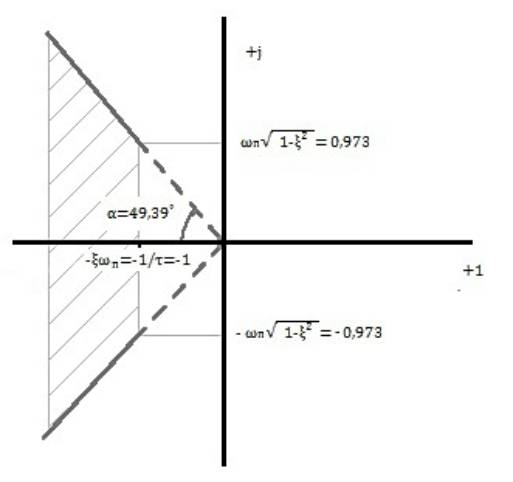
Рисунок
1 - Расположение и область определения полюсов полюсов недодемпфированной системы
второго порядка
Уменьшение
угла α сопровождается
уменьшением перерегулирования. Следовательно, для того чтобы перерегулирование
не превышало заданного значения расположение полюсов не должно выходить за
пределы заштрихованной области.
Учитывая,
что коэффициенты (2), определяющие значения корней передаточной функции (1) и расположение
полюсов на комплексной S-плоскости, являются
функцией параметров двигателя, нагрузки и механической передачи, можно
утверждать, что изменяя параметры электромеханической системы можно обеспечить
заданное качество переходного процесса.
Библиографический
список
1.Багаев А. Использование момента кориолисовых
сил для измерения массового расхода потока зерна и продуктов его
размола/А.А.Багаев, В.Г.Лукьянов, Р.С.Чернусь//Вестник Алтайского
государственного аграрного университета, 2008.-№4(42).-С.47-49.
2.Багаев А.А. Обоснование критерия выбора
электродвигателя центробежного расходомера сыпучих сельскохозяйственных
продуктов/А.А.Багаев, Р.С. Чернусь//Ползуновский вестник .-Барнаул; Изд-во
Алтайского государственного технического университета им. И.И.Ползунова,
2011.-№2/1 –С.188-193.
3.Ключев В.И. Теория электропривода/В.И.Ключев.-М.:
Энергоатомиздат, 2001.- 704 с.
4.Филлипс Ч. Системы управления с обратной
связью//Ч.Филлипс, Р.Харбор.-М.: Лаборатрия Базовых Знаний, 2001.-616 с.