УДК-621.01
УРАВНЕНИЯ ДВИЖЕНИЯ МНОГОСАТЕЛЛИТНЫХ ПЛАНЕТАРНЫХ
МЕХАНИЗМОВ ПРИВОДА ШПИНДЕЛЕЙ С ПЕРЕМЕННЫМИ ПЕРЕДАТОЧНЫМИ ОТНОШЕНИЯМИ
С.Тилоев,
Ф.Б. Шарипов, С.М. Саидамиров,
Б.Х.
Мухибуллоев, С.З. Валиев, Ф. Наджмизода
(К.т.н., доцент, ассистенты и соискатели ТАУ имени Ш. Шотемура
Республика Таджикистан )
Разработка эпициклических (планетарных)
механизмов привода рабочих органов уборочных машин с переменными передаточными
отношениями является важной задачей в области теории машин и систем машин. Разработанный
привод технических средств относится к машиностроению, в частности
сельскохозяйственного машиностроения применительно к рабочим органов
хлопкоуборочных машин.
Работоспособность
хлопкоуборочных аппаратов характеризуется в основном активностью шпинделей. Для
обеспечения полной активности шпинделей в рабочей зоне необходимо получить
переменные угловые скорости и ускорения требуемые для технологического процесса.
Предлагаемый механизм состоит из
кривошипов (1,2), ползунов (3,4), кулисы
(5,6), направляющей (7,8), сателлитов (9,10), солнечного колеса (11) и стойка
(12) рис.1 .
Принцип работы одной секции работает следующим образом. При вращение
кривошипов (1,2) поршни (3,4) совместно направляющей (7,8) внутри кулис (5,6)
совершают возвратно поступательное движения и вращательное движения при этом
сателлиты (9,10) перекатываются по солнечному колесу. Из за того что центр
вращения кулиса (О2) не совпадает с центром вращения кривошипа (О1)
и смещен на расстояние ![]() длина водила меняется
от конфигурации солнечного колеса.
длина водила меняется
от конфигурации солнечного колеса.
Преимущество: Предлагаемый
механизм является четырех шпиндельный; Уменьшается шум в машине; Уменьшается вес машины; Представляется возможность получить
переменные скоростные характеристики; Снижение потери хлопка-сырца и сохранение
качество волокна; Шпиндели совершают
вращение по всей поверхности солнечного колеса.
В многосателлитном планетарном механизме привода уборочных
аппаратов хлопкоуборочной машины в нашем случае имеется n = 6…8 шпинделей, а у существующих
равно n
= 12 до n
= 15 шпинделей (сателлитов).
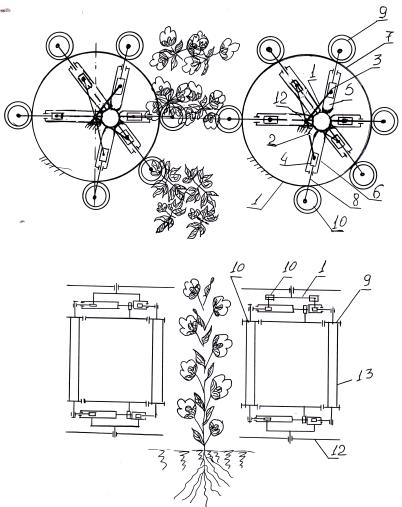
Рис.1. Однорядный планетарный
фрикционный привод шпинделей с составным водилом
Кинетическая энергия исследуемого механизма равна (рис.2)
![]()
где ![]() - приведенный момент
инерции составного водила, кг ∙ м2;
- приведенный момент
инерции составного водила, кг ∙ м2; ![]() - угловая скорость
составного водила, с-1.
- угловая скорость
составного водила, с-1.
Дифференциальные уравнения исследуемого колеса механизма
можно записать в виде:[3-5]
![]() (1)
(1)
где: МД
– движущий момент, приведенный к оси вращения барабана (составное водило)
многосателлитного планетарного фрикционного механизма от кариолисовой,
переносной и вращательной силы инерции, возникающей в центре вращения сателлита
(шпинделя); МС – момент сил сопротивления, учитывая сопротивление от
кустов хлопчатника, силы инерции вредных сопротивлений, потерь на трение в
узлах машины, а также воздействие машины на почву и вес машины.
Уравнения (1) после некоторых преобразований имеет вид:
 (2)
(2)
Переменные коэффициенты обозначим через [1-5]
 ;
;  ;
; ![]()
Тогда уравнения (2) имеет вид
![]() (3)
(3)
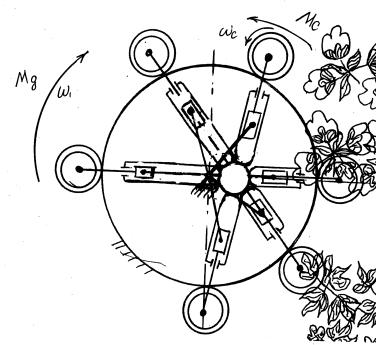
Рис.2. Динамическая схема планетарного привода шпинделей хлопкоуборочной машины.
Уравнения (3) являются нелинейными дифференциальными
уравнениями движения многосателлитного планетарного механизма, в которых
коэффициенты ![]() и
и ![]() являются переменными,
периодически изменяющимися в зависимости от φ и φ1.
Решения этих уравнений возможно методом Рунге-Кутта.
являются переменными,
периодически изменяющимися в зависимости от φ и φ1.
Решения этих уравнений возможно методом Рунге-Кутта.
Решение уравнения (3) позволяют определить параметры
машинных агрегатов с планетарными рабочими органами, обеспечивающими переменные
скоростные характеристики и переменные передаточные отношения между подвижными
звеньями уборочных машин, в частности, хлопкоуборочная машина 14ХВ-2,4А. Дается
инженерная методика выбора основных параметров привода рабочих органов шпинделя
(сателлитного колеса).
Литература
1. Авторское свидетельство № 755240.
2.Тилоев С. и др. Малый патент РТ ТJ № 158-270-287-326
Бюл. 51, 56,57,58 Душанбе.2008- 2010
гг.
3.Усманходжаев Х.Х., Тилоев С. Эпициклический механизм. А.с.
№1033797. Бюл. №29,
1983, 3 с.
4.Тилоев С., Гиеев А. - Материалы II международной конференции
«Механика-97»,
Вильнюс, 1997, с.6.
5.Яблонский А.С. Курс теоретической механики. ч.II. М.: 1972, 430 с.