СТРОИТЕЛЬСТВО И АРХИТЕКТУРА/3.Современные
технологии строительства,
реконструкции и реставрации.
Коц І.В., Попович М.М.
Вінницький національний технічний університет, Україна
ВИКОРИСТАННЯ МАТЕМАТИЧНОГО
МОДЕЛЮВАННЯ
ДЛЯ ДОСЛІДЖЕННЯ РОБОЧОГО ПРОЦЕСУ
АДАПТИВНОЇ ТРАМБІВКИ
Процес ущільнення ґрунтів
є важливою складовою підготовки основи, оскільки досягнутий коефіцієнт
ущільнення визначає міцність і стійкість споруд. Необхідною умовою ущільнення
ґрунту є взаємодія робочого органу трамбувальної машини з ґрунтовою основою. Для
аналізу впливу фізико-механічних властивостей ґрунту на параметри ущільнюючої
машини, необхідно описати процеси, що протікають при взаємодії його робочого
органу з ущільнюваним середовищем. При виконанні математичного моделювання робочого
процесу ущільнення ґрунту до розгляду було прийнято його реологічну модель, що
описує властивості ґрунту як ідеальне середовище.
Для складання
диференційних рівнянь, що описують динаміку робочого органу та трамбувальної
плити самопересувної адаптивної трамбівки [1,2], розглянемо основні фази циклу
її роботи.
В першій фазі циклу під
дією тиску робочої рідини відбувається зведення робочого органу (поршня-бойка)
трамбівки з одночасним стисканням газу в пневмоакумуляторі (чи стискання
механічної або гідравлічної пружини) та накопиченням потенційної енергії
поршня-бойка. За певних умов спрацьовує блок керування трамбівки і під дією
неврівноваженої сили з боку пневмоакумулятора відбувається розгін поршня-бойка.
З цього моменту починається друга фаза циклу робочого процесу трамбівки, яка
закінчується ударом робочого органу по нерухомій трамбувальній плиті, що лежить
на ґрунтовій основі. Ця фаза характеризується передачею енергії середовищу з
наступною деформацією грунту, трамбувальною плитою, швидкість якої може
приймати як додатні, так і від'ємні значення. Останні виникають при
підскакуванні трамбувальної плити від ґрунту, що ущільнюється. Викладене
виражається наступною умовою ущільнення ґрунту:
 (1)
(1)
де ![]() - швидкість переміщення
трамбувальної плити;
- швидкість переміщення
трамбувальної плити;
х1 - максимальне значення переміщення поршня-бойка;
х0 - довжина пневмоакумулятора;
D х2 - поточне значення переміщення трамбувальної плити;
![]() - швидкість переміщення
поршня-бойка;
- швидкість переміщення
поршня-бойка;
В
роботі розглядається друга фаза циклу роботи трамбівки, в якій швидкість
переміщення трамбувальної плити приймає лише додатні значення. Іншими словами,
розглядається процес занурення трамбувальної плити в ґрунт, з метою
встановлення впливу фізико-механічних властивостей середовища, що ущільнюється
на параметри трамбівки.
На
рисунку зображена розрахункова схема гідроінерційної самопересувної адаптивної
трамбівки [1], яка взаємодіє з ґрунтом,
що представлений у вигляді реологічної моделі Фойгта [2].
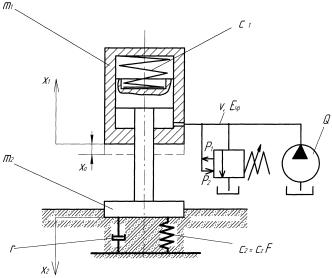
Рисунок. Розрахункова схема
гідроінерційної самопересувної адаптивної трамбівки:
m1 - маса робочого органу (поршня-бойка);
m2 - маса трамбувальної плити;
с1 - приведена жорсткість пневмоакумулятора (ПА);
с2-жорсткість ґрунту; r-коефіцієнт в’язкого опору ґрунту;
Qн - продуктивність насосу.
Диференційні
рівняння, що характеризують цю фазу робочого циклу для гідроінерційної
самопересувної адаптивної трамбівки, мають вигляд:
 (2)
(2)
Втратами
на тертя в цьому випадку можна знехтувати.
Приймемо
такі позначення
![]()
і перетворимо систему рівнянь (2):
 (3)
(3)
Застосовуючи до обох частин системи рівнянь (3)
перетворення Лапласа, з врахуванням початкових умов:
при t=0
![]()
![]() отримаємо
отримаємо
 (4)
(4)
Із системи рівнянь (4)
визначаємо зображення переміщень:
![]() (5)
(5)
 (6)
(6)
За
отриманими зображеннями x1(S)
і
x2(S) знаходимо початкові
функції x1(t) і x2(t)
,
які після приведення подібних членів будуть мати наступний вигляд:
![]() ;
(7)
;
(7)
![]() ; (8)
; (8)
![]()
![]() ;
; ![]()
![]() ;
; ![]() ;
;
![]() ;
;


Із виразів (7) і (8) знаходимо швидкості та прискорення
мас:
![]() (9)
(9)
![]()


Вирази
(8),(11) і (12) запишемо у відповідності з формою запису, прийнятою в теорії
коливань [4]:
![]()
![]()
![]()
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() .
.
![]()
![]()
За
допомогою виразів (13), (14) і (15) можемо визначити значення сили опору грунту
Fгр для різних його жорсткостей
і щільностей.
Рішення
системи рівнянь (7-15) з використанням ЕОМ дає змогу отримувати необхідні
розрахункові параметри для забезпечення оптимального робочого режиму
самопересувної адаптивної трамбівки, при різних значеннях c2 і опорі
взаємному переміщенню її рухомих мас.
Результати
проведеного математичного моделювання для реальних конструкцій ущільнюючого
устаткування свідчать про можливості ефективного застосування самопересувної
адаптивної трамбівки для ущільнення різних видів грунтів.
Список літератури
1. А.с. № 658207, СССР. Навесная гидроинерционная трамбовка /
Коц И.В., Матвеев И.Б., Марков П.И.. Бюл. № 15, 1979.
2. Иванов М.Е. Гидропривод сваепогружающих и грунтоуплотняю-
щих машин / М.Е. Иванов, И.Б. Матвеев, Р.Д. Искович-Лотоцкий и др. – М.: Машиностроение, 1977.- 174 с.
3. Цытович Н.А. Механика грунтов. – М.: Госстройиздат, 1963. – 636 с.
4.
Андронов
А.А. Теория колебаний / А.А. Андронов, А.А.
Витт,
С.Э.Хайкин.
– М.: Физматгиз, 1959. – 918 с.
5. Блехман И.И. Вибрационная механика. М.:
Наука, 1994.– 246 c.