ИИУС определения параметров
препятствий
Куликовский
К.Л., Гагулин С.В.
Самарский
государственный технический университет, Самара
Промышленное освоение ресурсов Мирового Океана является актуальной
задачей, как в связи с истощением их на материках, так и в связи с бурным
развитием средств и методов получения, анализа, оценки и эксплуатации полезных
ископаемых в условиях водной среды.
Подводные
рудные образования полезных ископаемых бывают нескольких типов, к первому типу
относятся залежи руды находящиеся ниже уровня дна, а также запасы нефти и газа,
добыча которых ведётся в прибрежных районах. Второй тип оруднения связан с
проявлением вулканизма. Третий тип металлоносные
осадки представляют собой обогащенные Fe, Mn (железо-марганцевые конкреции) и некоторыми другими
рудными элементами морские отложения. Скопления полезных ископаемых в россыпях
сформировались в результате механического концентрирования минеральных частиц,
высвобожденных при выветривании материнских пород и руд. Минералы россыпей
характеризуются высоким удельным весом и устойчивостью к химическому
выветриванию. Среди рудных минералов - это самородные золото и платина,
касситерит, вольфрамит, шеелит, киноварь, ильменит, колумбит, танталит,
монацит, циркон.
Подводные объекты
искусственного происхождения требуют внимательного отношения к состоянию ввиду
их повышенной техногенной опасности. К подобным объектам относятся затонувшие
суда, нефте-газопроводы, буровые платформы. Соответственно характеру объектов
определяются задачи для исследования. Нефтегазопроводы пролегают по дну, на
большие расстояния, необходимо находить протечки, таким образом необходим
аппарат, который может преодолевать большие расстояния в автономном режиме,
привязка по курсу происходит на основании магнитных датчиков. Буровые платформы
требуют оперативного погружения, возможность подзарядки аккумулятора позволяет
проводить фото-видеосъёмку. Затонувшие суда требуют от аппарата реализовывать
поисковую функцию, когда необходимо найти на участке определённой площади
объект с заданными параметрами, таким образом, подводный аппарат должен
сочетать интеллектуальную ИИУС, возможность работать длительное время в
автономном режиме, и при обнаружении объекта произвести фото-видеосъёмку.
Уникальную возможность
непосредственных наблюдений изучаемых рудных объектов и целенаправленного
отбора образцов геологи получили при помощи подводных планирующих зондов.
Подводные геологические исследования по детальности становятся сопоставимы с
геологическими наблюдениями на суше [2].
Подводные планирующие зонды двигаются по заранее заданной
траектории движения. Во время движения подводного аппарата на его пути
появляются препятствия, предугадать которые не всегда представляется возможным
в виду того, что аппарат двигается на больших глубинах в мало изученных районах
океана, поэтому ИИУС должна обнаруживать препятствия находящиеся по курсу
следования. Задача коррекции траектории в условиях автономного плавания состоит
из определения расстояния до препятствия его габаритных размеров и
соответственно коррекция траектории таким образом, чтобы предотвратить
столкновение. Затем ИИУС должна вывести зонд на исходную траекторию, при этом
попутно должно быть обеспечено экономичное энергопотребление, что определяет
длительность автономных подводных исследований. В качестве универсального
метода подводных измерений подходит ультразвуковая локация. Принцип действия
измерительной системы основывается на искусственно создаваемом сигнале заданной
силы и направленности, по интенсивности отражённого сигнала можно судить о
расстоянии до препятствия и его
габаритах. Анализ и оценка полученной информации служат основанием для
управляющего модуля для изменения регулируемых параметров таким образом, что
судно совершит обходной манёвр.
Математическая модель движения зонда предполагает
наличие следующих регулируемых параметров,
управление которыми реализует алгоритм изменяемого движения АНПА:
·
Положение центра тяжести
·
Плавучесть
Исполняемые органы имеют определённый интервал
движения, физически это выражается, тем, что нельзя перенести центр тяжести за
корпус зонда, или создать отрицательную плавучесть массой больше, чем масса
аппарата наполненного водой. Таким образом на математическую модель
накладываются ограничения геометрических параметров зонда и запаса хода его
исполняемых органов.
Вероятность обнаружения объекта поиска существенно зависит, с
одной стороны, от состава поисковой аппаратуры, ее разрешающей способности, с
другой,— от размеров и характера
аномальной зоны,
отражательной способности объекта и других его характеристик. Эти факторы
влияют также на выбор программы функционирования ПА. Наиболее эффективными
являются гидроакустические, магнитометрические, радиометрические средства
поиска. [1]
Таким образом,
можно сформулировать следующие принципы формирования поведения АНПА при
обнаружении препятствия:
- выявление на фоне
множества разнородных объектов таких объектов, которые обладают какими-либо
интересными для исследователя признаками, например, типичными для множества
или, наоборот, аномальными;
- при получении контакта
(сигнала обнаружения) система управления осуществляет перевод аппарата с
опорной траектории на траекторию которая позволяет избежать столкновения с
препятствием.
В режиме обхода препятствия
ИИУС должна обеспечить управляемое движение АНПА и точное переопределения его
местоположения;
- по окончании программы
обхода препятствия аппарат возвращается
на опорную траекторию. [1]
формирование рационального
движения на основании таких параметров как манёвренность и точность движения
является задачей оптимизации;
Влияние средовых факторов
Идеальная среда
При планировании подводных
работ траектория зонда рассчитывается
исходя из идеальных условий среды пребывания и искусственно вводимой
погрешности на основании неполных данных о течениях, турбулентных потоках и
состоянии дна. Расчётная траектория является для системы управления эталонной и
препятствия отсутствуют, или если о них известно, заложены при планировании
пути. Движение для АНПА задаётся в виде циклов. Управляющими движением
параметрами являются такие переменные величины как: время, плавучесть,
положение центра тяжести.
Реальная среда
Реальная среда
представляет собой совокупность движущихся и статичных объектов, исчерпывающей
информации о которых, как правило, нет. АНПА основную работу проводит в
придонных слоях, где отсутствуют турбулентные течения. Выполнение глубоководных
работ сопряжено с риском возникновения аварийных ситуаций связанных с угрозой
столкновения АНПА и подводных объектов различного генезиса. Подводные объекты
можно разделить по степени угрозы на три вида.
1)
К первому виду относятся
неподвижные (статические) объекты: формирования рельефа дна, затонувшие суда,
газо-нефтепроводы.
2)
Ко второму виду относятся
подвижные (динамические) объекты: крупные обитатели подводного мира, дрейфующие
льды, надводные и подводные суда.
3)
К третьему виду относятся условные препятствия,
которые будут восприниматься ИИУС АПНП неоднозначно, то есть на грани помех и
реальных объектов, к ним относятся косяки мелких рыб, облака планктона,
рыболовные сети, водоросли и плотные взвеси частиц.
Разделение препятствий на виды позволяет
выделить несколько типов поведения АНПА, каждый тип характеризуется только ему
присущим алгоритмом организации движения аппарата.
Параметры обнаружения препятствий
Продвигаясь под водой, АНПА вступает в контакт с объектами
подводного мира, посредством датчиков. ИИУС аппарата должна однозначным образом
определить перед собой препятствие, если таковое имеется, а также выбрать
алгоритм поведения исходя оценки показаний датчиков. Критерием выбора являются
такие показатели как расстояние до препятствия (дистанция) и его вид. Третий параметр
– геометрические размеры объекта, они определяют величину корректировки курса и
позволяют прогнозировать столкновение. Дистанция делится на три вида, в
соответствие с характеристиками датчиков и манёвренностью аппарата.
1)
Дальняя дистанция –от
предела чувствительности датчиков – до
зоны пониженной манёвренности зонда.
2)
Средняя дистанция – от
зоны пониженной манёвренности зонда – до корпуса АНПА.
3)
Ближняя дистанция –
корпус зонда.
Дистанция
определяет датчики, которые должны быть установлены на АНПА.
ИИУС подводного аппарата
Автоматический подводный аппарат следует рассматривать как
средство, состоящее из двух функционально различных частей: 1) комплекса
исследовательской аппаратуры, оборудования прикладного назначения и 2) носителя
этого комплекса. Состав комплекса и его характеристики являются функцией
решаемых аппаратом задач. По своему составу он может быть неизменным либо
изменяемым. Структура же носителя и режимы функционирования аппарата в целом
определяются уже не только назначением, но и принципом действия аппарата как
автономного автоматического средства. [1]
Все
датчики связаны ИИУС и их основное назначение сохранить реальную траекторию
движения максимально приближенной к эталонной, рассчитанной и заложенной в
ИИУС.
Энергопотребление сенсоров
Управление энергопотреблением позволяет
увеличить срок эксплуатации АНПА. Когда показания одного из датчиков
свидетельствовать о наличие препятствия, его необходимо выводить в фокус,
увеличивая режим работы (например повышая частоту посылаемого импульса), за
счёт остальных датчиков и систем, которые выводятся в фоновую работу (сниженные
режимы работы). На дальней дистанции необходимо обеспечить штатный режим работы
гидроакустического сканера. На средней дистанции при угрозе столкновения датчик
необходимо выводить в фокус для более
детального определения параметров препятствия. На ближней дистанции гидроакустический
сканер выводится из фокуса, обеспечив работу аварийных систем спасения.
Алгоритмы поведения АНПА
Каждый
вид препятствия предполагает определённую реакцию системы управления, в виде
алгоритма поведения АНПА.
1)
Дальняя дистанция –
происходит корректировка маршрута в соответствие с геометрическими размерами
препятствия. Штатный, управляемый режим.
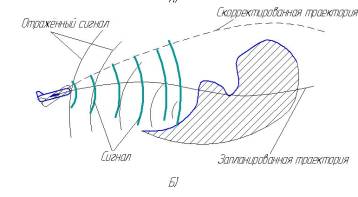
Рис.1 Схема коррекции траектории
движения при обнаружении препятствия на дальней дистанции
2)
Средняя дистанция – при штатном режиме работы аппарат не успевает сманеврировать и
столкновение неизбежно, в этом случае запускается режим неуправляемого
аварийного всплытия посредством скачкообразного изменения плавучести, контроль
осуществляется только глубиномером, после того как зонд осуществило всплытие на
определённую глубину ИИУС проверяет наличие препятствия, при отрицательном
результате аппарат возвращается на начальную траекторию.
3)
Ближняя дистанция - датчики зафиксировали механический контакт и повреждение АНПА. В
этом случае запускается режим неуправляемого аварийного всплытия, зонд
транслирует сигнал SOS, координаты своего места положения и уходит в дрейф для
экономии энергии.
Все препятствия характеризуются набором свойств, вступая в отношения с которыми АНПА реализует тот или иной алгоритм поведения.
Алгоритм обхода препятствий в штатном режиме
|
|
|
|
Движение при постоянной средней высоте над дном. |
Движение при постоянной средней глубине |


Рис.2 Схема движения при различных управляющих параметрах
Движение
зонда описывается уравнениями, исходя из характера траектории, так при прохождении
препятствия с постоянной высотой над уровнем дна, траектория движения в
вертикальной плоскости точно повторяет контур рельефа дна и представляет собой
пилообразную кривую. Зубцы пилы состоят из отрезков, таким образом ИИУС
реализует линейные перемещения и расчёт будет производиться через уравнения
отрезков. При прохождении препятствия с постоянной глубиной, траектория движения в горизонтальной
плоскости в ИИУС будет описываться уравнением дуг и окружностей.
БИБЛИОГРАФИЧЕСКИЙ
СПИСОК
1. Автоматические
подводные аппараты/Агеев М. Д., Касаткин Б. А., Киселев Л. В. и др. — Л.:
Судостроение, 1981 (Техника освоения океана).— 224 с.
2. Сагалевич А.М. Океанология и подводные обитаемые аппараты. М.:
Наука, 1987. 256 с.