Технические науки/6.Электротехника и радиоэлектроника
Моделирование алгоритма управления преобразователем частоты и реализация
структуры управления на базе контроллеров семейства STM32
Волков А. В., Байков Д. В., Герман О.Ю..
Мордовский государственный университет им. Н. П. Огарева, Россия
Одним из важнейших элементов при создании
регулируемого электропривода является получение энергоэффективных законов
управления и повышение КПД самой машины.
Целью алгоритма микроконтроллерной системы управления является создание
универсального способа управления асинхронным электроприводом и улучшение
динамических и статических характеристик асинхронной электрической машины.
Поэтому большое значение имеет не только реализация алгоритма векторного
управления, но и адекватность самой модели к процессам, происходящим в
преобразователе частоты. Выбор контроллера
при реализации системы управления инвертором является одной из главных задач.
Контроллер должен обеспечивать высокое быстродействие, иметь разрядность не
менее 16 bit, встроенный многоканальный АЦП–модуль и шесть и более
таймеров-счетчиков с функцией ШИМ. Применение
микроконтроллерной системы позволяет управлять асинхронным двигателем (АД) с
использованием различных законов векторного управления, что существенно снижает
затраты на построение энергоэффективных приводов переменного тока с асинхронным
двигателем.
Векторное управление
электроприводом с асинхронным двигателем применяется при повышенных требованиях
к динамическим или статическим характеристикам регулирования входных переменных
привода. Улучшение динамических свойств привода с АД является результатом того,
что в переходных процессах имеется возможность поддерживать постоянство
потокосцепления ротора. Векторное
управление применяется в электроприводах главного движения и подач металлорежущих
станков, в намоточных механизмах, требующих регулирования натяжения материала,
в сервоприводах, выполняющих задачу быстродействующего регулирования положения,
в тяговом электроприводе, в приводе электродов дуговых сталеплавильных печей и
множестве других механизмов [1].
Для построения систем
векторного управления АД могут быть использованы любые пары векторов, с помощью
которых можно представить электромагнитный момент обобщенной электрической
машины. Однако от выбора векторов в значительной мере зависит степень сложности
системы. Желательно, чтобы величины, представленные векторами в уравнении
момента, были наблюдаемы, т.е. чтобы их можно было непосредственно измерить и
воздействовать на них при управлении. У короткозамкнутого АД есть только две
такие величины – это напряжение и ток статора, и только одна из них, а именно
ток статора, может входить в уравнение момента. Тогда другой величиной может
быть только ток ротора или какое-либо потокосцепление. Ток ротора принципиально
наблюдаем, а устройства его идентификации по наблюдаемым параметрам сложны и не
надежны. Поэтому для выбора остаются три потокосцепления: статора, ротора и
основное, т.е. магнитный поток в зазоре АД. Потокосцепление статора и рабочий
поток АД можно непосредственно измерить и использовать этот сигнал в системе
управления, что часто и делается при создании приводов высокого качества. В
массовых же изделиях разработчики стараются использовать сигналы, доступные без
установки датчиков, т.е. все те же ток и напряжение статора, по мгновенным
значениям, которые можно вычислить, например, потокосцепление статора. Однако
при выборе потокосцепления статора или основного потокосцепления передаточные
функции системы управления получаются довольно сложными и малоподходящими для
практического использования.
Таким образом,
принцип векторного управления заключается в раздельном управлении магнитным
потоком и моментом АД с помощью независимых составляющих тока статора,
соответствующих проекциям вектора тока на оси системы координат,
ориентированной по направлению вектора магнитного потока [2].
Модель
преобразователя частоты, работающего на асинхронный двигатель мощностью 15 кВт,
представлена на рисунке 1. В модели используется система управления с косвенной
ориентацией по полю.
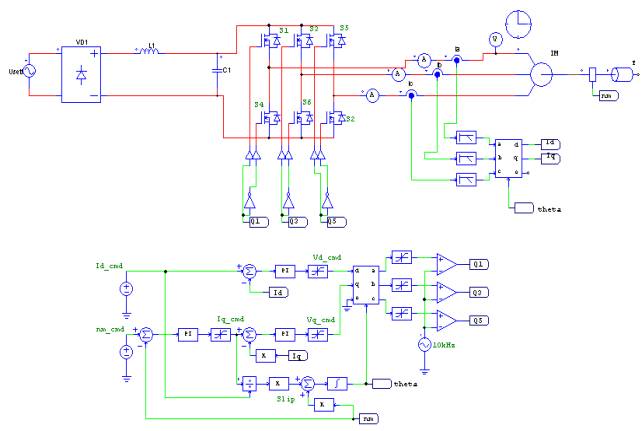
Рисунок 1 – Модель
преобразователя с АД в системе PSIM
Схему можно разделить
на две части: силовую часть и систему управления силовой частью. Силовая часть
состоит из однофазного выпрямителя VD1, входного фильтра L1C1, трехфазного
инвертора напряжения, выполненного на МОП-транзисторах (S1–S6), нагрузки,
представленной в виде асинхронного двигателя IM и момента на валу T. Систему
управления можно разделить на две части – систему измерения тока в статорной
обмотке двигателя и систему формирования ШИМ сигнала. Система измерения состоит
из трех датчиков тока Ia, Ib, Ic. Осциллограмма тока статора с датчиков тока
представлена на рисунке 2.
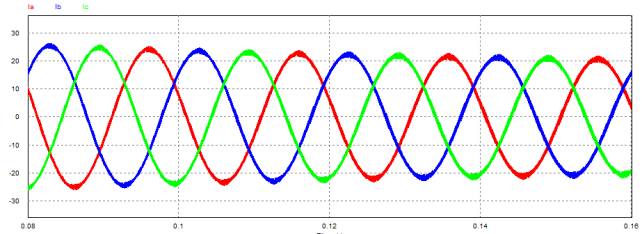
Рисунок 2 – Осциллограмма тока
статора
Из осциллограммы
видно, что использование инвертора напряжения с ШИМ обеспечивает форму тока
близкую к синусоидальной, тем самым увеличивает КПД двигателя.
Сигналы с датчиков
тока поступают на фильтры второго порядка, обеспечивающие фильтрацию пульсаций
высших гармоник тока статора. После фильтрации сигналы тока подаются на блок
преобразования функции. Так как форма тока близка к синусоидальной, но не
является таковой, необходимо произвести линеаризацию сигналов для того чтобы
была возможность для дальнейшей работы с данным сигналом при формировании
воздействия на вторую часть схемы.
Блок формирования ШИМ
включает в себя два источника напряжения, один из которых формирует ток
статора, а второй задает напряжение, смещенное относительно тока статора и
датчика тока вращения вала. Сигнал Id_cmd поступает на сумматор, где из него
вычитается сигнал блока преобразования Id. После этого преобразования сигнал
поступает на ПИ–регулятор и линеаризатор, который ограничивает амплитуду
сигнала, тем самым поступая на блок преобразования. В это же время, сигнал с
источника напряжения run_cmd поступает на сумматор, где из него вычитается
сигнал датчика скорости вала двигателя. После этого, полученный сигнал
поступает на ПИ регулятор и линеаризатор. Сформированный сигнал поступает на
блок обратной связи, где из этого сигнала вычитается сигнал из блока преобразования
Iq, а сигнал обратной связи theta поступает на блок преобразования сигналов с
датчиков тока статора.
Блок формирования
сигналов управления МОП–транзисторами состоит из блока преобразования, трёх линеаризаторов
и трёх компараторов. Сигналы с каждого выхода поступают на транзисторы,
управляющие фазами напряжения статорной обмотки.
На рисунке 3 показана
осциллограмма управляющего импульса транзистора.
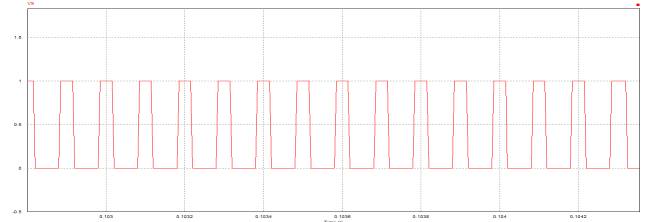
Рисунок 3 – Осциллограмма управляющего импульса
транзистора
На рисунке 4
представлено напряжение на статорной обмотке двигателя.
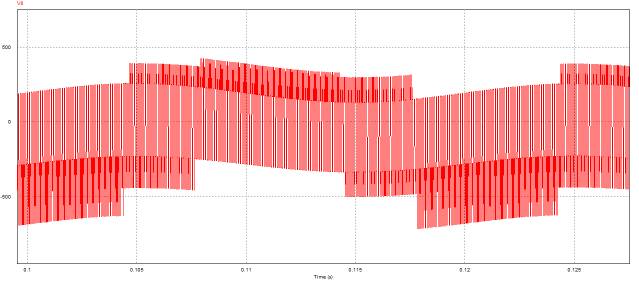
Рисунок 4 – Напряжение на статорной обмотке двигателя
Таким образом, с
помощью векторного управления с косвенной ориентацией по полю статора
повышается КПД электропривода, увеличивается коэффициент мощности двигателя и
отсутствуют токи нулевой последовательности, что приводит к уменьшению потерь в
стали
Семейство ARM Cortex
- новое поколение процессоров, которые выполнены по стандартной архитектуре и
отвечают различным технологическим требованиям. В отличие от других ЦПУ ARM,
семейство Cortex является завершенным процессорным ядром, которое объединяет
стандартное ЦПУ и системную архитектуру. Микроконтроллеры STM32 выполнены на основе профиля
Cortex-M3, которое специально разработано для применений, где необходимы
развитые системные ресурсы и, при этом, малое энергопотребление. Они
характеризуются настолько низкой стоимостью, что могут конкурировать с
традиционными 8 и 16-битными микроконтроллерами. Cortex-M3 является стандартизованным микроконтроллерным ядром, которое
помимо ЦПУ, содержит все остальные составляющие основу микроконтроллера
элементы (в т.ч. система прерываний, системный таймер SysTick, отладочная
система и карта памяти). 4 гигабайтное адресное пространство Cortex-M3
разделено на четко распределенные области кода программы, статического ОЗУ,
устройств ввода-вывода и системных ресурсов. В отличие от ядра ARM7, Cortex-M3
выполнено по Гарвардской архитектуре и, поэтому, имеет несколько шин,
позволяющие выполнять операции параллельно. Семейство Cortex имеет возможность
оперировать с фрагментированными данными (unaligned data), что также отличает
его от предшествующих архитектур ARM. Этим гарантируется максимальная
эффективность использования внутреннего статического ОЗУ. Семейство Cortex
также поддерживает возможности установки и сброса бит в пределах двух областей
памяти размером 1 Мбайт по методу bit banding. Этот метод предоставляет эффективный
доступ к регистрам и флагам УВВ, расположенных в области статического ОЗУ, и
исключает необходимость интеграции полнофункционального битового процессора.
Еще одним ключевым
компонентом ядра Cortex-M3 является контроллер векторизованных вложенных
прерываний (КВВП). КВВП предоставляет стандартную структуру прерываний для всех
Cortex-микроконтроллеров и способы их обработки. КВВП предписывает векторы
прерываний для 240 источников, для каждого из которых может быть установлен
свой приоритет.
На рисунке 5 представлена
структурная схема контроллера семейства STM32 на базе ядра Cortex-M3.
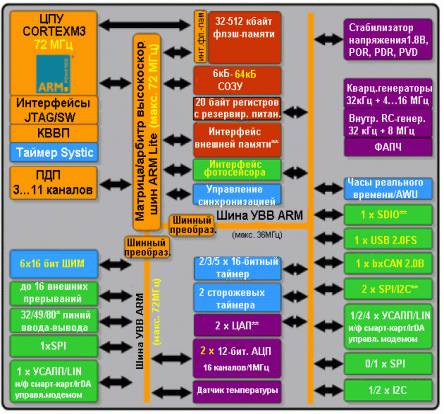
Рисунок 5 – Структурная схема контроллера семейства STM32
На первый взгляд
набор встроенных УВВ, в т.ч. два АЦП, таймеры общего назначения, I2C, SPI, CAN,
USB и часы реального времени (ЧРВ), кажется идентичным самым простым
микроконтроллерам. Но если детально рассмотреть каждое из этих УВВ, то
выяснится, что они гораздо более сложные. Например, 12-битный АЦП оборудован
датчиком температуры и поддерживает несколько режимов преобразования, а МК с
двумя АЦП могут использовать их совместно еще в девяти режимах преобразования.
По аналогии с этим, каждый из четырех таймеров, оснащенных блоками захвата и
сравнения, могут использоваться как отдельно, так и совместно, образую более
сложные массивы таймеров. У расширенного таймера (advanced timer) добавлена
поддержка управления электродвигателями. Для этого у него предусмотрено 6
комплементарных ШИМ-выходов с программируемой паузой неперекрытия и вход
экстренного останова, который переводит ШИМ-выходы в предварительно
запрограммированное безопасное состояние. У интерфейса SPI предусмотрен
аппаратный генератор CRC для 8 и 16 слов, что упрощает реализацию интерфейса
карт Flash памяти SD и MMC.
Микроконтроллеры
STM32 отличаются казалось бы невозможным сочетанием характеристик малого
энергопотребления и высокой производительности. Они способны работать от 2
Вольтного источника питания на тактовой частоте 72МГц и потреблять, при этом,
ток, с учетом нахождения в активном состоянии всех встроенных ресурсов, всего
лишь 36 мА. Если же использовать поддерживаемые ядром Cortex экономичные режимы
работы, то потребляемый ток можно снизить до ничтожных 2 мкА в режиме STANDBY.
Для быстроты возобновления активной работы микроконтроллера используется
внутренний RC-генератор на частоту 8 МГц. Его активность сохраняется на время
запуска внешнего генератора. Благодаря быстроте перехода в экономичный режим
работы и выхода из них результирующая средняя потребляемая мощность еще больше
снижается.
В зависимости от
модели, в микроконтроллеры STM32 может быть встроено один или два
аналогово-цифровых преобразователя. АЦП питаются отдельным напряжением, которое
в зависимости типа корпуса может находиться в пределах 2.4…3.6В. Источник
опорного напряжения (ИОН) АЦП соединен либо внутренне с напряжением питания
АЦП, либо со специальными внешними выводами. АЦП характеризуется 12-битной
разрешающей способностью и частотой преобразования 1МГц. У него имеется до 18
мультиплексированных каналов, 16 из которых можно использовать для измерения
внешних сигналов. Оставшиеся два канала связаны со встроенным датчиком
температуры и внутренним ИОН.
В режиме
широтно–импульсной модуляции помимо базового режима сравнения, каждый таймер
поддерживает специальный режим генерации ШИМ-сигналов. В этом режиме период ШИМ
задается с помощью регистра автоматической перезагрузки таймера. Значение
заполнения импульсов задается через регистр захвата/сравнения канала. Таким
образом, каждый таймер может генерировать до четырех независимых ШИМ-сигналов.
Таймеры могут работать и синхронизированно, позволяя генерировать до 16
синхронизированных ШИМ-сигналов. На рисунке 6 представлены различные режимы
работы таймеров ШИМ.
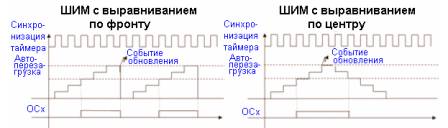
Рисунок 6 – Режимы работы таймеров ШИМ
В каждом канале можно
генерировать ШИМ-сигнал с выравниванием по фронту или по центру. В режиме с
выравниванием по фронту, падающий фронт импульса всегда совпадает с моментом
перезагрузки таймера. Изменение значения в регистре захвата/сравнения позволяет
легко управлять моментом возникновения нарастающего фронта ШИМ-сигнала. В
режиме с выравниванием по центру, таймер конфигурируется как реверсивный
счетчик, который сначала считает в прямом направлении, а затем - в обратном.
Когда будет выявлено совпадение счетчика с регистром захвата/сравнения канала,
инвертируется состояние выходного сигнала канала.
На рисунке 7
представлена функциональная схема ПЧ с векторной системой управления
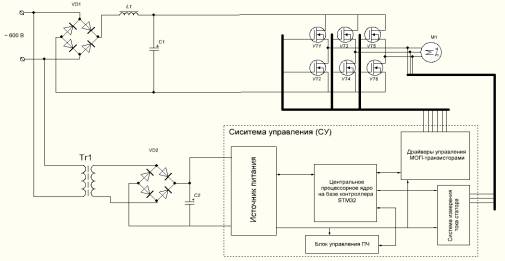
Рисунок 7 – Функциональная схема ПЧ с векторной системой
управления
Из функциональной
схемы видно, что система управления ПЧ состоит из системы измерения тока
статора, блока управления ПЧ, центрального процессорного ядра на базе
контроллера STM32, драйвера управления МОП–транзисторами и источника
питания. Так как контроллер обладает высокими техническими характеристиками, то
алгоритм, представленный в среде моделирования PSIM можно реализовать на базе
контроллера семейства STM32 с ядром Cortex и тактовой частотой 72 МГц.
Реализация данного алгоритма может быть произведена с использованием
специальных библиотек и языка высокого уровня С/С+.
Разработанный алгоритм и функциональная схема позволяют сделать вывод о
том, что использование современных контроллеров в системах векторного
управления значительно снижает стоимость разрабатываемого устройства, а также
облегчает процесс схемотехнической реализации.
Литература:
1. Усольцев А.А.
Частотное управление асинхронными двигателями: учебное пособие /
А. А. Усольцев – СПб: СПбГУ ИТМО, 2006. – 94 с.
2. Виноградов А.Б.
Векторное управление электроприводами переменного тока / А. Б. Виноградов
ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина».
– Иваново, 2008. – 298 с.