д.т.н. Брейдо И.В., Усова Е.Д.
Карагандинский государственный технический университет
Разработка имитационной модели
электропривода постоянного тока «неуправляемый выпрямитель – широтно-импульсный
преобразователь повышенной частоты»
В последние годы, в связи с освоением
промышленного производства силовых полупроводниковых приборов нового
технического уровня IGBT и бурным развитием
компьютерных технологий появились возможности существенного улучшения
статических и динамических характеристик электроприводов постоянного тока.
Перспективным вариантом является создание
электропривода по системе «Неуправляемый выпрямитель – широтно-импульсный преобразователь
повышенной частоты» (НВ-ШИП ПЧ). Повышение частоты коммутации преобразователя
позволит повысить быстродействие электропривода, улучшить его энергетические
характеристики и уменьшить зону прерывистых токов.
С целью исследования электропривода
«НВ-ШИП ПЧ», разработанного на основе IGBT
модулей, создан стенд и выполнены экспериментальные исследования[1].
Схема замещения силовой части разработанного
электропривода изображена на рисунке 1.
Напряжение источника питания подается на неуправляемые выпрямитель цепи
якоря. С выхода неуправляемого выпрямителя через емкость и ШИП напряжение
подается в цепь якоря электродвигателя.
Особенностью данного электропривода
является наличие ШИП ПЧ и емкостного сглаживающего фильтра, которые повышают
быстродействие электропривода, улучшают его энергетические характеристики и
уменьшают зону прерывистых токов.
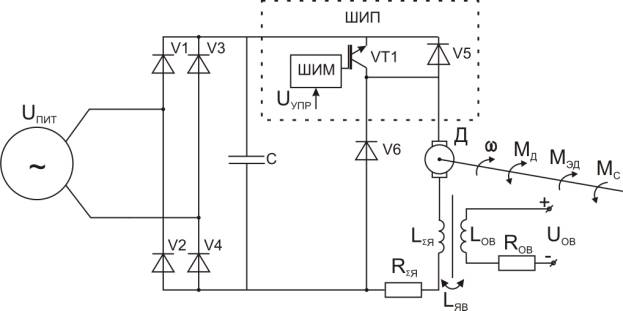
UИП –
напряжения источника питания, диоды (V1-V4) – однофазный неуправляемый выпрямитель, С –
емкостной сглаживающий фильтр, ШИП – широтно-импульсный преобразователь, который
состоит из IGBT (VT1), шунтирующего диода V5 и ШИМ (широтно-импульсного модулятора), UУПР –
напряжение управления, Д – электродвигатель постоянного тока, диод V6 – диод, шунтирующий цепь якоря электродвигателя Д, LΣЯ –
суммарная индуктивность цепи якоря, RΣЯ – суммарное
сопротивление цепи якоря, LЯВ – взаимоиндукция между цепью якоря и цепью обмотки
возбуждения, LОВ –индуктивность обмотки возбуждения, RОВ
–сопротивление обмотки возбуждения, UОВ – напряжение, подаваемое в цепь обмотки возбуждения,
ω – угловая скорость электродвигателя Д, МД – динамический
момент электродвигателя Д, МЭД –момент электродвигателя Д, МС
– момент сопротивления.
Рисунок 1 –Схема замещения электропривода постоянного
тока
Для синтеза системы автоматического
регулирования с использованием ППП MatLab
осуществлена разработка математической модели электропривода постоянного тока
(ЭП ПТ) по системе «НВ-ШИП ПЧ», его имитационная модель представлена на рисунке
2.
Рисунок 2 – Имитационная модель электропривода
постоянного тока
Основными функциональными блоками
имитационной модели являются:
·
источник питания:
однофазный, синусоидальный, амплитуда 310В, частота 50Гц (IP);
·
неуправляемый
выпрямитель: универсальный однофазный диодный мост (NV);
·
емкостной сглаживающий
фильтр (С);
·
ШИП: представляет собой IGBT, шунтированный диодом (IGBT+Subsystem+Diode);
·
электродвигатель
постоянного тока (DC).
Технические характеристики машины
постоянного тока представлены в таблице 2.
Таблица 2 – Технические характеристики машины
постоянного тока:
|
Марка |
П22 |
|
Мощность,
кВт (Продолжительный режим) |
1,0 |
|
Напряжение
якоря (UЯ), В |
220В |
|
Ток
якоря, А |
5,9А |
|
Номинальная
скорость, об/мин |
1500 |
|
Момент
инерции якоря, кг·м2 |
0,052 |
|
Сопротивление
обмотки якоря, Ом |
4,17 |
|
Сопротивление
обмотки возбуждения, Ом |
880 |
|
Напряжение
обмотки возбуждения, В |
220 |
Для построения имитационной модели
использованы стандартные блоки библиотеки SPS Simulink ППП MatLab.
Для оценки адекватности работы
электропривода проведены имитационные исследования в наиболее характерных режимах
его работы:
·
холостой ход;
·
номинальный режим;
·
режим работы при UЯ=0,5UЯ.
Результаты экспериментов, проведенных как на
реальном стенде [1], так и на имитационной модели, приведены на следующих рисунках:
осциллограммы напряжения в режиме холостого хода - на рисунке 3, номинального
режима работы - на рисунке 4, в режиме работы при UЯ=0,5UЯ - на
рисунке 5; осциллограммы тока для режима при UЯ=0,5UЯ - на
рисунке 6. Эксперименты проводились для частоты коммутации ШИП, равной 1 кГц.
Проведем анализ полученных результатов.
|
|
|
|
а) |
б) |
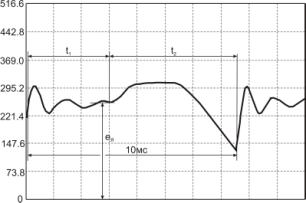
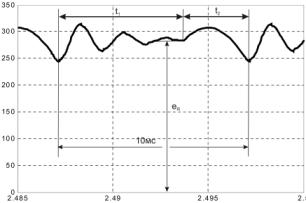
Рисунок 3 – Осциллограммы
напряжения на якоре электродвигателя, снятые в режиме холостого хода:
а) экспериментальная
осциллограмма, б) результат имитационного эксперимента
|
|
|
|
а) |
б) |
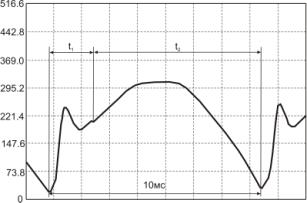
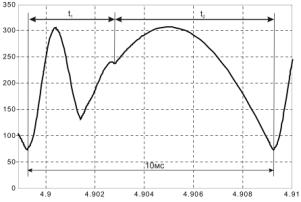
Рисунок 4 - Осциллограммы
напряжения на якоре электродвигателя, снятые в номинальном режиме работы:
а) экспериментальная
осциллограмма, б) результат имитационного эксперимента
|
|
|
|
а) |
б) |
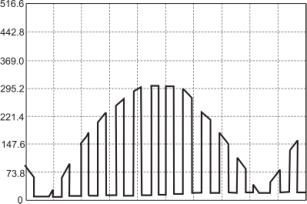
Рисунок 5 - Осциллограммы
напряжения на якоре электродвигателя в режиме работы при UЯ=0,5UЯ при
номинальной нагрузке:
а) экспериментальная
осциллограмма, б) результат имитационного эксперимента
|
|
|
|
а) |
б) |
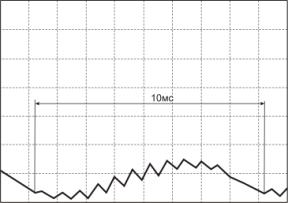
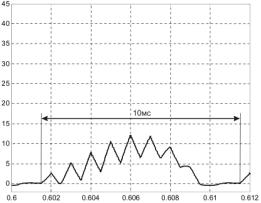
Рисунок 6 - Осциллограмма
тока якоря электродвигателя в режиме работы при UЯ=0,5UЯ при
номинальной нагрузке:
а) экспериментальная
осциллограмма, б) результат имитационного эксперимента
Участки t1 (рисунки 3-4) соответствуют
нулевому току через обмотку якоря электродвигателя. Колебательные процессы
вызваны закрытием одной пары вентилей и открытием второй пары, частота
колебания и интенсивность затухания колебательных процессов зависят от
индуктивной и активной компоненты цепи якоря и емкости сглаживающего фильтра. Участки
t2 (рисунок 3-4) характеризуют протекание тока через
якорь. Общий характер, амплитуда и длительность периода осциллограмм напряжения
и тока якоря, снятых с реального стенда и имитационной модели совпадают.
Отличия реальных и имитационных осциллограмм заключаются в длительности разряда
ЭДС самоиндукции электродвигателя (участки t1) и броске напряжения в первой трети на участках t1. Это объясняется неточностью оценки параметров в демпфирующей
цепи вентилей имитационной модели рассматриваемого электропривода, тем не менее
ошибка моделирования не превышает 5%.
В таблице 2, эксперимент 1, последняя треть участков t1 соответствует напряжению ЭДС электродвигателя
Из осциллограммы эксперимента №№ 3 и 4 можно судить о том, что при
нагрузке на валу двигателя в момент, когда силовой ключ закрыт, ток непрерывен
в области работы одной пары вентилей. В момент закрытия одной пары вентилей и
открытия второй пары появляется зона
прерывистого тока. Следует отметить, что зона прерывистых токов в
рассматриваемом электроприводе при частоте fШИМ=1кГц
меньше, чем в электроприводах по системе «тиристорный преобразователь -
двигатель», содержащих однофазный двухполупериодный выпрямитель.
Из результатов
проведенного сравнительного анализа можно сделать вывод, что разработанная имитационная
модель ЭП ПТ, построенного по системе «НВ - ШИП ПЧ», адекватна, обеспечивает
точность в пределах 5% и может быть использована для исследования характеристик
и режимов работы исследуемого ЭП.
Литература
1. Брейдо И.В.,
Садвакасов В.С. Электропривод постоянного тока с широтно-импульсной модуляцией
повышенной частоты // Тезисы докладов межвузовской региональной студенческой
научной конференции. 19-20 апреля 2007г. Часть 1. Караганда: Изд-во
КарГТУ, 2007. 566с.