Неженцев А.Б., Гонтарь Д.В., Аветисян С.М.
Восточноукраинский
национальный университет им. В.Даля
Снижение
нагрузок при передвижении мостовых кранов с частотным управлением
Анализ переходных
процессов мостовых кранов с частотным управлением электроприводов передвижения
показал, что в зависимости от изменения таких факторов как время работы
частотного преобразователя (TP),
диапазон регулирования частоты напряжения статора (f1), шаг изменения частоты (hч) динамические нагрузки на металлоконструкцию крана Sм и груз Sк, а также
время разгона крана tр могут как значительно снижаться, так и существенно возрастать.
Для мостового крана
г/п 10 т, представленного в виде трехмассовой модели, движение которой
описывается нелинейными дифференциальными уравнениями второго порядка [1, 2]
были построены уравнения регрессии максимальных динамических нагрузок ![]() и
и ![]() , а также времени разгона крана tр при частотно-регулируемом пуске (с законом управления
, а также времени разгона крана tр при частотно-регулируемом пуске (с законом управления![]() ):
):
 (1)
(1)
 (2)
(2)
 (3)
(3)
где ![]() - кодированные
значения факторов TP, hч, f1, (см. табл. 1)
- кодированные
значения факторов TP, hч, f1, (см. табл. 1)
Таблица 1 - Уровни и интервалы варьирования факторов TP,
hч, f1
|
Уровни факторов |
ТР, с |
hЧ, Гц |
f1, Гц |
|
Код (zi) |
z1 |
z2 |
z3 |
|
Основной уровень (zi = 0) |
3,0 |
1,5 |
42,5 |
|
Интервал варьирования (Dzi) |
1,0 |
1,0 |
7,5 |
|
Верхний уровень (zi = +1) |
4,0 |
2,5 |
50,0 |
|
Нижний уровень (zi = -1) |
2,0 |
0,5 |
35,0 |
Уравнения регрессии (1-3) позволяют
исследовать влияние каждого фактора и их взаимодействий на максимальные
динамические нагрузки и длительность переходного процесса. В качестве примера
на рис. 1 – 3 показаны графики зависимостей максимальных динамических нагрузок ![]() ,
, ![]() и времени разгона крана tр от шага изменения
частоты hЧ частотного преобразователя.
и времени разгона крана tр от шага изменения
частоты hЧ частотного преобразователя.
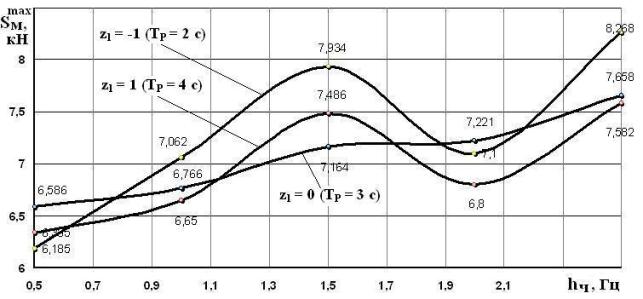
Рис. 1. Зависимость динамических нагрузок в
металлоконструкции крана ![]() от шага изменения частоты hЧ
частотного преобразователя
от шага изменения частоты hЧ
частотного преобразователя

Рис. 2. Зависимость горизонтальных динамических
нагрузок ![]() , действующих на груз от шага
изменения частоты hЧ частотного преобразователя
, действующих на груз от шага
изменения частоты hЧ частотного преобразователя
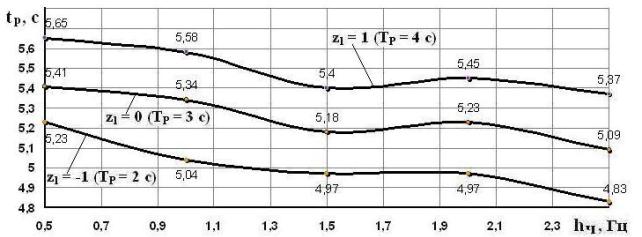
Рис. 3. Зависимость времени разгона крана tр от шага изменения
частоты частотного преобразователя hЧ
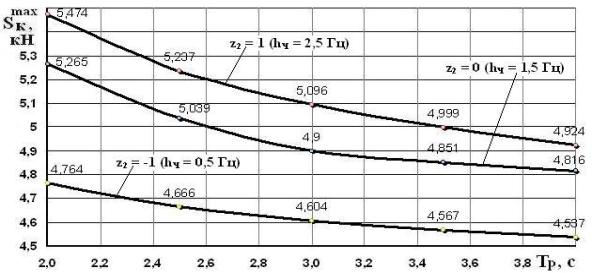
Рис. 4. Зависимость горизонтальных динамических
нагрузок ![]() , действующих на груз от времени работы частотного
преобразователя TP
, действующих на груз от времени работы частотного
преобразователя TP
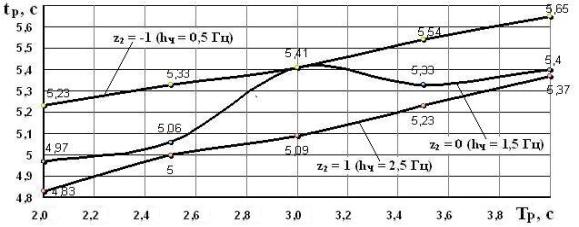
Рис. 5. Зависимость времени разгона крана tр от
времени работы частотного преобразователя TP
Анализ результатов проведенных
исследований позволил сделать выводы:
- при увеличении шага изменения частоты hЧ
нагрузки ![]() и
и ![]() возрастают, соответственно на 26% и 13%, а время разгона крана tр – уменьшается более чем на 9%;
возрастают, соответственно на 26% и 13%, а время разгона крана tр – уменьшается более чем на 9%;
- с увеличением времени работы частотного
преобразователя TP
нагрузки ![]() и
и ![]() снижаются соответственно на 24% и 11%, а время разгона крана tр – возрастает более чем на 10%;
снижаются соответственно на 24% и 11%, а время разгона крана tр – возрастает более чем на 10%;
- уменьшение диапазона регулирования
частоты напряжения статора f1 с 0...50 Гц до 0...35 Гц
приводит к росту времени разгона крана tр до 20% при существенном
снижении нагрузок ![]() и
и ![]() .
.
Таким образом, для снижения уровня
максимальных динамических нагрузок ![]() ,
, ![]() мостовых кранов при
частотно-регулируемом пуске необходимо: уменьшать шаг изменения частоты hЧ
(например, до 0,5 Гц); время работы частотного преобразователя TP в процессе пуска должно
быть максимально возможным; в случае если плавность переходного процесса более
важна, чем производительность (например, для монтажных кранов) разгонять кран
надо до скорости меньше номинальной при уменьшенном диапазоне регулирования
частоты напряжения статора (0...35 Гц).
мостовых кранов при
частотно-регулируемом пуске необходимо: уменьшать шаг изменения частоты hЧ
(например, до 0,5 Гц); время работы частотного преобразователя TP в процессе пуска должно
быть максимально возможным; в случае если плавность переходного процесса более
важна, чем производительность (например, для монтажных кранов) разгонять кран
надо до скорости меньше номинальной при уменьшенном диапазоне регулирования
частоты напряжения статора (0...35 Гц).
Литература
1.
Будиков Л.Я., Нгуен
Н.К., Неженцев А.Б. Исследование динамики грузоподъемных кранов // Вестник
машиностроения, №4. - М.: Изд-во Машиностроение, 1981, - С. 39-42.
2.
Аветисян С.М., Неженцев
А.Б. Программное обеспечение для исследования
переходных процессов грузоподъемных кранов (ч. 1: при работе механизмов
передвижения) // Підйомно-транспортна техніка, №4(8). - Днепропетровск, 2003. – с. 33-48.