НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ ИНЕРЦИОННО-ИМПУЛЬСНЫХ ПЕРЕДАЧ
БЕЗ МЕХАНИЗМОВ СВОБОДНОГО ХОДА
Инерционно-импульсные передачи являются
автоматическими бесступенчатыми передачами механического типа и обладают целым
рядом преимуществ по сравнению с бесступенчатыми передачами других типов [1,2].
Общая схема инерционно-импульсных передач содержит импульсный механизм, представляющий
собой механическую систему с двумя степенями свободы и имеющий неуравновешенные
грузы, и два механизма свободного хода,
один из которых (корпусной) замыкает крутящий момент на корпус, а другой (выходной)
передает момент на ведомый вал. Механизмы свободного хода являются наиболее
слабыми звеньями инерционно-импульсных передач и сдерживают широкое применение
этих передач в машиностроении. Поэтому можно выделить следующие перспективные направления
исследований инерционно-импульсных передач:
1) совершенствование конструкций механизмов свободного хода; 2) разработка
инерционно-импульсных передач с одним механизмом свободного хода; 3) разработка
инерционно-импульсных передач без механизмов свободного хода. С точки зрения создания
работоспособной конструкции интерес вызывает третье направление, как полностью
исключающее из конструкции передачи наименее надежные звенья ─ механизмы
свободного хода.
Рассмотрим схему [1] инерционно-импульсных
передач лишь на основе импульсного механизма (см. рис. 1а). Здесь 1 – ведущий вал
импульсного механизма, 2 – неуравновешенные грузовые звенья, центр тяжести ![]() которых не совпадает
с их геометрическим центром
которых не совпадает
с их геометрическим центром ![]() , 3 – ведомый вал.
, 3 – ведомый вал.
Математическая модель таких передач может
быть построена с помощью уравнений Лагранжа второго рода.
За обобщенные координаты при составлении
уравнений (1) примем углы поворота ведущего вала ![]() и ведомого вала
и ведомого вала ![]() импульсного
механизма..
импульсного
механизма..
Кинетическая энергия системы находится по выражению
[1]:
![]() ,
,
где
![]() - моменты инерции
ведущего и ведомого вала соответственно,
- моменты инерции
ведущего и ведомого вала соответственно,
![]() - суммарный момент
инерции неуравновешенных звеньев относительно геометрического центра,
- суммарный момент
инерции неуравновешенных звеньев относительно геометрического центра,
![]() - суммарная масса
неуравновешенных звеньев,
- суммарная масса
неуравновешенных звеньев,
![]() - расстояние между
геометрическим центром и центром масс неуравновешенного звена,
- расстояние между
геометрическим центром и центром масс неуравновешенного звена, ![]() - параметры
импульсного механизма.
- параметры
импульсного механизма.
Для определения крутящего момента ![]() , действующего на ведущий вал импульсного механизма,
воспользуемся динамической характеристикой асинхронного электродвигателя,
учитывающей влияние электромагнитных переходных процессов:
, действующего на ведущий вал импульсного механизма,
воспользуемся динамической характеристикой асинхронного электродвигателя,
учитывающей влияние электромагнитных переходных процессов:
![]()
где ![]() - номинальный момент ротора двигателя;
- номинальный момент ротора двигателя;
![]() - угловые скорости
соответственно идеального холостого хода и номинальная;
- угловые скорости
соответственно идеального холостого хода и номинальная;
![]() - электромагнитная
постоянная времени двигателя;
- электромагнитная
постоянная времени двигателя;
![]() - коэффициент
крутизны статической характеристики.
- коэффициент
крутизны статической характеристики.
Применяя уравнения (1), получим
математическую модель инерционно-импульсного привода, представляющую собой
систему нелинейных дифференциальных уравнений пятого порядка
 (2)
(2)
где

![]() - приведенный момент сопротивления, действующий на ведомый
вал импульсного механизма.
- приведенный момент сопротивления, действующий на ведомый
вал импульсного механизма.
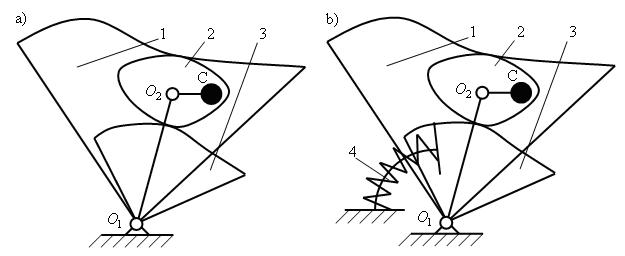
Рис. 1. Физические модели
инерционно-импульсных передач
без механизмов свободного хода
Для осуществления лишь колебательных
движений ведомого вала, что требуется
для выполнения некоторых технологических процессов, можно применить схему (см. рис.
1b), при которой ведомый вал импульсного механизма
связано с корпусом упругой связью 4. Упругая связь исключает возможность
однонаправленного вращения. Обозначения звеньев 1, 2, 3 на рис. 1b такие же, что и для схемы, изображенной на рис. 1а.
Уравнения Лагранжа для схемы с упругой
связью будут включать не только кинетическую, но и потенциальную энергию
где ![]() ,
, ![]() - потенциальная энергия
системы.
- потенциальная энергия
системы.
В нашем случае ![]() , где
, где ![]() - угловая жесткость
упругого элемента. Поэтому дифференциальные уравнения движения будут иметь вид
- угловая жесткость
упругого элемента. Поэтому дифференциальные уравнения движения будут иметь вид
 (3)
(3)
Аналитические решения систем (2) и (3)
можно построить с помощью приближенных методов, учитывая переменность угловой
скорости ведущего вала. При этом полученные решения имеют сравнительно
громоздкий вид. Поэтому в данной работе используем допущение о неизменности
угловой скорости ведущего вала (![]() ), что позволит понизить порядок систем дифференциальных
уравнений движения трансформатора, сводя систему (2) лишь к одному
дифференциальному уравнению второго порядка
), что позволит понизить порядок систем дифференциальных
уравнений движения трансформатора, сводя систему (2) лишь к одному
дифференциальному уравнению второго порядка
![]() (4)
(4)
а
систему (3) к уравнению вида
![]() (5)
(5)
где переменные коэффициенты ![]() те же, что и в
уравнениях системы (2), а угол
те же, что и в
уравнениях системы (2), а угол ![]() определяется выражением
определяется выражением
![]() Здесь
Здесь ![]() ,
, ![]() - соответственно значения угловой скорости и угла поворота
ведущего вала в начальный момент времени
- соответственно значения угловой скорости и угла поворота
ведущего вала в начальный момент времени ![]()
Как показали численные решения
дифференциального уравнения (5) по методу Рунге─Кутта при различных
параметрах передачи и различных начальных условиях, динамическая картина инерционной
передачи без механизма свободного хода отличается большим разнообразием. На рис. 2 изображены некоторые из полученных
фазовых траекторий и периодических решений.
Рис.6. Примеры фазовых траекторий и периодических
решений
Выводы
1. В работе получены математические модели
инерционно-импульсных передач лишь на основе импульсного механизма. Рассмотрены
варианты передач с упругой связью выходного звена импульсного механизма с
корпусом и без такой связи с учетом динамической характеристики двигателя.
Составленные математические модели представляют собой системы существенно
нелинейных обыкновенных дифференциальных уравнений.
2. Выявлено существование разнообразных
видов фазовых траекторий и периодических движений инерционно-импульсных передач
без механизмов свободного хода с упругой связью ведомого вала импульсного
механизма с корпусом при различных параметрах передач, начальных условиях и
значений нагрузки на ведомом валу. Выявленное разнообразие показывает широкие
возможности рассмотренных передач в реализации различных кинематических и динамических
режимов работы.
БИБЛИОГРАФИЧЕСКИЕ
ИСТОЧНИКИ
1.
Леонов А.И. Инерционные
автоматические трансформаторы вращающего момента. М.: Машиностроение, 1978. 224
с.
2.
Пожбелко В.И. Инерционно-импульсные приводы машин с динамическими связями. М.: Машиностроение, 1989. 136 с.
3.
Леонов А.И. К общей
теории инерционных трансформаторов вращающего момента//Известия вузов.
Машиностроение, 1975, № 7, с. 49-52.
4.
Алюков С.В. Динамика
инерционного трансформатора вращающего момента без механизмов свободного хода:
Автореф. дис. …канд. техн. наук, ВПИ, 1983.