Докт.
техн. наук Гришин А.П., канд. экон. наук Гришин А.А., инж. Гришин В.А.
Сокращение аварийности погружного электронасоса
при питании от преобразователя частоты
Работа погружного насоса от
преобразователя частоты имеет значительное преимущества перед работой его
напрямую от сети. Это, прежде всего, возможность плавного регулирования
производительности насоса, что важно для прямоточных систем водообеспечения,
где случайный переменный расход потребления воды должен обеспечиваться
переменной подачей насоса, то есть расход и подача должны быть согласованы.
Такие согласованные режимы дают до 30…40% экономии электроэнергии. Кроме того,
применение преобразователей обеспечивает плавный пуск электронасоса, исключает
пусковые гидроудары и пескование скважин, сохраняя подшипник подпятника. Эти
основные преимущества применения преобразователей частоты для питания погружных
электронасосов зачастую остаются невостребованными по причине опасения
потребителей, что электронасос, в этом случае, выйдет из строя из-за перегрева.
Надо сразу оговориться, что основания для этого есть. И вот почему.
Тепловой режим электродвигателя зависит от двух
факторов: от нагрева определяемого потерями и от охлаждения. Охлаждение
двигателя осуществляется потоком воды, образующимся между стенкой обсадной
трубы скважины и поверхностью двигателя при всасывании её насосом, и зависит от
скорости этого потока.
Частотное регулирование
обеспечивает изменение частоты вращения насоса, а, следовательно, и его
производительность согласно расходу потребления воды от некоторой максимальной
величины qmax до минимальной qmin. Снижение производительности или
расхода погружного электронасоса снижает степень охлаждения двигателя, что
отрицательно влияет на его тепловые режимы.
Кроме того, имеет место фактор
дополнительных потерь в двигателе питаемым от преобразователя частоты. Дело вот
в чем.
При работе преобразователя
изменение частоты f всегда сопровождается изменением
амплитуды выходного напряжения U, между которыми существует
функциональная зависимость U(f). В
теории частотного электропривода эта функция имеет термин: «закон управления
напряжением».
Известен общий закон оптимального
управления напряжением [1]:
![]() , (1)
, (1)
где ![]() – соответственно
напряжение, частота и момент на валу двигателя, нормированные по номинальным
величинам.
– соответственно
напряжение, частота и момент на валу двигателя, нормированные по номинальным
величинам.
Известно также, что условием выбора
электропривода для механизма, является соответствие их механических
характеристик ![]() , где ω*
– относительная, нормированная по
номинальной величине, частота вращения привода. При этом в практических
расчетах используют приближенное равенство
, где ω*
– относительная, нормированная по
номинальной величине, частота вращения привода. При этом в практических
расчетах используют приближенное равенство ![]() .
.
Для вентиляторной механической характеристики вида ![]() (в том числе для центробежных насосов), после его подстановки
в (1), закон управления напряжением будет иметь вид:
(в том числе для центробежных насосов), после его подстановки
в (1), закон управления напряжением будет иметь вид:
![]() . (2)
. (2)
Иначе дело обстоит, если насос
работает с противодавлением. Механическая характеристика при этом будет иметь
более сложную функциональную зависимость. Определим ее, следуя рекомендациям [2].
Мощность насоса зависит от расхода
и напора, и определяется следующим
выражением:
![]() (3)
(3)
где q – расход обеспечиваемый насосом, м3/ч; ![]()
![]() – напорная характеристика сети – зависимость
давления создаваемого насосом в функции расхода в сети с гидравлическим
сопротивлением
– напорная характеристика сети – зависимость
давления создаваемого насосом в функции расхода в сети с гидравлическим
сопротивлением ![]() , ч2/м5 и статическим напором
(противодавлением)
, ч2/м5 и статическим напором
(противодавлением) ![]() , м в. ст.;
, м в. ст.; ![]() – КПД насоса
зависящий от расхода [3].
– КПД насоса
зависящий от расхода [3].
Обеспечение электронасосом необходимых технологических
параметров в водопроводной сети: требуемого в данный момент времени расхода
воды ![]() и давления
и давления ![]() , обусловлено величиной относительной частоты вращения
рабочего колеса насоса ω* или привода. А
также параметрами самого насоса:
, обусловлено величиной относительной частоты вращения
рабочего колеса насоса ω* или привода. А
также параметрами самого насоса: ![]() - коэффициентом гидравлического сопротивления
насоса и
- коэффициентом гидравлического сопротивления
насоса и ![]() - давлением насоса при расходе равном нулю, и
параметрами сети
- давлением насоса при расходе равном нулю, и
параметрами сети ![]() и
и ![]() . Зависимость, связывающая все эти величины, имеет
вид:
. Зависимость, связывающая все эти величины, имеет
вид:
 , (4)
, (4)
где ![]()
![]() -
текущая частота вращения электронасоса;
-
текущая частота вращения электронасоса; ![]() -
номинальная частота вращения электронасоса при 50 Гц;
-
номинальная частота вращения электронасоса при 50 Гц; ![]() – суммарное
гидравлическое сопротивление.
– суммарное
гидравлическое сопротивление.
Заменим в (3) аргумент ![]() на
на ![]() воспользовавшись (4)
предварительно выделив из него
воспользовавшись (4)
предварительно выделив из него  :
:
 . (5)
. (5)
Разделим левую и правую часть
равенства (5) на ![]() и получим зависимость
момента насоса от частоты вращения, учитывающую параметры характеристики сети,
в том числе противодавление:
и получим зависимость
момента насоса от частоты вращения, учитывающую параметры характеристики сети,
в том числе противодавление:
 . (6)
. (6)
Если
принять ![]() ,
то получим выражение для простой вентиляторной механической
характеристики:
,
то получим выражение для простой вентиляторной механической
характеристики:
 , (7)
, (7)
где ![]() – постоянный
коэффициент, равный номинальному моменту, а
– постоянный
коэффициент, равный номинальному моменту, а ![]() [3].
[3].
И в относительных единицах, при
условии, что  – номинальная
мощность насоса, а
– номинальная
мощность насоса, а ![]() – номинальный момент
насоса:
– номинальный момент
насоса:
![]() . (8)
. (8)
Для погружного электронасоса, работающего
с большими статическими напорами, механическая характеристика будет иметь вид
отличный от простой вентиляторной.
Эта характеристика (6) для
различных значений ![]() после преобразований
и нормирования путем деления левой и правой части равенства (6) на отношение
после преобразований
и нормирования путем деления левой и правой части равенства (6) на отношение ![]() , будет иметь вид:
, будет иметь вид:
 . (9)
. (9)
Так например, для насоса
ЭЦВ4-2,5-65 с параметрами Ноп=73 м в. ст.; S=2,0 ч2/м5;
![]() п=296 1/с; Рп=1,5 кВт и работающего на сеть с
гидравлическим сопротивлением Z=2,0 ч2/м5, механические характеристики построенные по (9) приведены
на рис. 1: для
характеристики сети
п=296 1/с; Рп=1,5 кВт и работающего на сеть с
гидравлическим сопротивлением Z=2,0 ч2/м5, механические характеристики построенные по (9) приведены
на рис. 1: для
характеристики сети ![]() при
при ![]() , то есть простой вентиляторной характеристики и для трех значений
, то есть простой вентиляторной характеристики и для трех значений ![]() при
при ![]() .
Значения КПД насоса в функции расхода рассчитаны по формуле приведенной в [4].
.
Значения КПД насоса в функции расхода рассчитаны по формуле приведенной в [4].
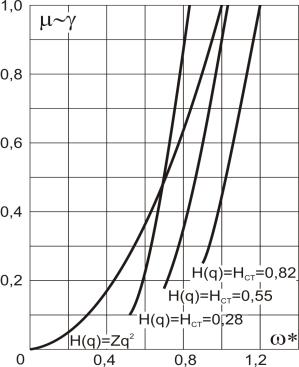
Рис. 1. Механическая характеристика насоса для различных значений статического напора.
Как видно из графиков механические
характеристики насоса, работающего без противодавления ![]() при
при ![]() , и с противодавлением
(для большей убедительности примем
, и с противодавлением
(для большей убедительности примем ![]() ) имеют другую форму, которую при выборе механической
характеристики частотного привода важно учитывать для эффективной работы
агрегата.
) имеют другую форму, которую при выборе механической
характеристики частотного привода важно учитывать для эффективной работы
агрегата.
Механические характеристики, рис.
1, с достаточно для практических целей точностью, можно аппроксимировать прямыми
вида μ=вω*+с, таблица 2.
Таблица 2. Аппроксимация механических
характеристик погружного насоса
и закон управления напряжением
|
Противодавление, о.е. |
Нст=0,28 |
Нст=0,55 |
Нст=0,82 |
|
Аппроксимирующее
выражение |
μ=1,9ω*-0,9 |
μ=2,9ω*-2,0 |
μ=2,8ω*-2,3 |
|
Достоверность
аппроксимации |
0,975 |
0,965 |
0,992 |
|
Закон
управления напряжением преобразователя |
|
|
|
Поскольку закон управления по (1)
предусматривает управление напряжением, а, следовательно, и потоком непрерывно,
соответственно изменению нагрузки, а, также учитывая тождественность (2) и (8),
можно говорить о прямой пропорциональности напряжения и момента, то есть ![]() ~
~![]() .
.
Чтобы это
условие было обеспечено для случая, когда механическая характеристика насоса отлична
от квадратичной характеристики, необходимо выбрать закон управления напряжением
преобразователя согласно (1), где учитывалась бы механическая характеристика
насоса работающего с противодавлением.
Закон
управления напряжением, таблица 2, получен из условия ω*=(α-β), где β=f2/f1n≈Sп – параметр абсолютного скольжения, рассматриваемый как
промежуточный параметр нагрузки, f2 – частота ротора, Sп
– номинальное скольжение [1].
Подставляя
в (1) выражение механической характеристики в виде линейной функции и заменяя
частоту вращения её выражением через частоту и абсолютное скольжение, получаем:
![]() . (10)
. (10)
В [5] на числовом примере, показано, что
управление по закону (10) обеспечит меньшую величину потерь по сравнению с
управлением по закону (2), а, следовательно, и меньший нагрев двигателя. Расчет
выполнен для погружного двигателя ПЭДВ 1,5 – 96.
По результатам расчетов построены
графики превышения температуры корпуса и потерь мощности для двух вариантов
управления напряжением (2) – на графиках индекс «квад» и (10) – на графиках
индекс «расч», рис. 2 и 3.
Таким образом, изменение
напряжения при частотном регулировании в соответствии с расчетным законом (10)
позволит обеспечить снижение потерь и нагрева двигателя, таблица 3, а значит и
его аварийности.
|
|
Рис. 2
Превышение температуры корпуса электродвигателя в зависимости от расхода
Рис. 3
Зависимость потерь мощности в зависимости от расхода
Таблица 3.
Эффективность применения расчетного закона управления
напряжением
преобразователя в сравнении с квадратичным
|
Показатель
эффективности |
Противодавление, о.е. |
Расход, о.е. |
Снижение, % |
|
Полные потери мощности двигателя
электронасоса |
Нст=0,55 |
0 |
72 |
|
1,0 |
17 |
||
|
Нст=0,82 |
0 |
78 |
|
|
1,0 |
61 |
||
|
Превышение температуры корпуса двигателя
электронасоса |
Нст=0,55 |
0,2 |
68 |
|
1,0 |
18 |
||
|
Нст=0,82 |
0,33 |
76 |
|
|
1,0 |
61 |
Выводы
Выбор закона управления
напряжением преобразователя частоты, учитывающим зависимость нагрузки от
частоты вращения насоса, работающего с
противодавлением, обеспечит снижение полных потерь мощности
электродвигателя и его перегрев до 72% и 68% соответственно. В свою очередь это
приведет к сокращению аварийности
погружного электронасоса при его работе с преобразователем частоты.
Литература.
1. Булгаков А.А. Частотное управление асинхронными двигателями. – М.: Наука, 1966, - 300 с.
2. Онищенко Г.Б., Юньков М.Г. Электропривод турбомеханизмов. М.: Энергия, 1972. – 240 с.
3. Гришин А.П., Гришин В.А. Коэффициент полезного действия частотно-регулируемого электронасоса// Автоматизация и информатизация электрифицированного сельскохозяйственного производства. Научные труды. Том 89. М.: ВИЭСХ, 2004. С. 118 – 127.
4. Гришин А.П. Закон регулирования преобразователя частоты при питании погружного электронасоса //С.О.К., №7, 2007, с. 20-22.