К.т.н. Твердоступ Н.И.
Днепропетровский национальный
университет им. Олеся Гончара
О КОМПЕНСАЦИИ РЕАКТАНСА ИНДУКТИВНОГО ДАТЧИКА
Применение индуктивных
датчиков в низкочастотных резонансных устройствах измерения и контроля в ряде
случаев ограничивается малыми значениями их собственных индуктивности, добротности
и невысокой чувствительностью к контролируемому параметру. Поэтому актуальным
является создание устройств, позволяющих увеличивать индуктивность датчика до
необходимого значения с одновременным повышением чувствительности контроля.
Анализ результатов, полученных в
[1], обосновывает целесообразность использования комбинированной операционной схемы для
создания умножителей индуктивности. Линейная комбинированная операционная схема
(ЛКОС) обладает свойством масштабирования
импеданса с сохранением знака, что позволяет на ее основе создавать умножители реактансов [2].
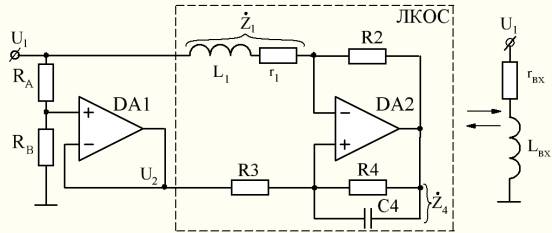
В линейной комбинированной
операционной схеме (рис.1) с индуктивным
импедансом в цепи отрицательной обратной связи характерным является наличие
комбинированной обратной связи, а также то, что внешние сигналы возбуждения
поступают синфазно на оба входа операционного усилителя. Из
а)
б)
Рис. 1 – Линейная комбинированная
операционная схема (а) и ее
эквивалент (б)
выводов к
работе [1] следует,
что входной импеданс такой схемы равен
![]() = (
= (![]()
![]() (1)
(1)
где ![]() – комплексный импеданс индуктивности L1 с активным сопротивлением r1; R2 , R3 – активные сопротивления
цепи комбинированной обратной связи усилителя DA2;
– комплексный импеданс индуктивности L1 с активным сопротивлением r1; R2 , R3 – активные сопротивления
цепи комбинированной обратной связи усилителя DA2; ![]() – комплексный импеданс параллельно соединенного сопротивления
– комплексный импеданс параллельно соединенного сопротивления ![]() и емкости
и емкости ![]() ; n = U2 / U1, U1 и U2 – напряжения сигналов возбуждения.
Повторитель на усилителе DA1 с резистивным делителем RА, RВ представляет собой источник напряжения возбуждения U2, синфазного входному напряжению U1.
; n = U2 / U1, U1 и U2 – напряжения сигналов возбуждения.
Повторитель на усилителе DA1 с резистивным делителем RА, RВ представляет собой источник напряжения возбуждения U2, синфазного входному напряжению U1.
Из (1) следует, что отношение n напряжений
возбуждения оказывает основное влияние
на величину ![]() , а именно: при n
→1 и U2 < U1 значение входного импеданса
, а именно: при n
→1 и U2 < U1 значение входного импеданса ![]() существенно увеличивается.
Отношение n напряжений возбуждения
можно представить через отношение сопротивлений делителя в виде
существенно увеличивается.
Отношение n напряжений возбуждения
можно представить через отношение сопротивлений делителя в виде
![]() (2)
(2)
тогда входной импеданс ![]() , выраженный
через параметры схемы, будет
, выраженный
через параметры схемы, будет
![]() (3)
(3)
Справедливо также, что ![]() , представленный через входные параметры, равен
, представленный через входные параметры, равен
![]() = rвх + jωLвх,
(4)
= rвх + jωLвх,
(4)
где rвх, Lвх
– входные активное сопротивление и индуктивность. Тогда из
(3) и (4) следуют выражения активной и индуктивной составляющих входного импеданса
![]() (5)
(5)
![]() (6)
(6)
показывающие, что в настоящей схеме индуктивность L1 с активным сопротивлением r1 преобразуются во входные
индуктивность Lвх и сопротивление rвх с коэффициентом умножения равным
![]() (7)
(7)
который, при
выполнении условия RB >> RA, может принимать большие значения.
Из (5) следует, что умножение активного сопротивления r1 сопровождается его
компенсацией отрицательной активной составляющей
входного импеданса ЛКОС равной
![]() (8)
(8)
При ![]() → r1 входное
сопротивление rвх → 0, что указывает на возможность повышения добротности
индуктивности. Более детально о повышении добротности умноженной индуктивности
рассмотрено в [2].
→ r1 входное
сопротивление rвх → 0, что указывает на возможность повышения добротности
индуктивности. Более детально о повышении добротности умноженной индуктивности
рассмотрено в [2].
Из (6)
следует, что умножение индуктивности L1 на коэффициент m происходит одновременно с уменьшением ее начального значения на величину![]() , имеющей размерность индуктивности. Эту величину будем называть
компенсирующей индуктивностью Lк. Выражение (6) представим в виде
, имеющей размерность индуктивности. Эту величину будем называть
компенсирующей индуктивностью Lк. Выражение (6) представим в виде
![]() . (9)
. (9)
Допустим,
что под воздействием контролируемого параметра индуктивность L1 изменится на величину ΔL1, тогда входная
индуктивность станет
![]() . (10)
. (10)
Из
(9), (10) следует, что абсолютное приращение входной индуктивности составит
![]() (11)
(11)
а
относительное приращение
![]() (12)
(12)
причем,
при ![]() Видно, что абсолютное приращение входной индуктивности
определяется коэффициентом умножения m ,
а относительное приращение – величиной компенсирующей индуктивности Lк. Это показывает, что в рассматриваемой схеме возможно
масштабирование индуктивности датчика с управлением величины чувствительности к
контролируемому параметру.
Видно, что абсолютное приращение входной индуктивности
определяется коэффициентом умножения m ,
а относительное приращение – величиной компенсирующей индуктивности Lк. Это показывает, что в рассматриваемой схеме возможно
масштабирование индуктивности датчика с управлением величины чувствительности к
контролируемому параметру.
Умножитель индуктивности по схеме на
рис.1 был построен на операционных усилителях МСР604, в качестве умножаемого
импеданса использовалась катушка с индуктивностью L1 = 21,06 мГн и активным сопротивлением r1 = 5,4 Ом, исследования проводились на частоте 1 кГц при R4 = ∞.
Результаты исследования возможности
умножения индуктивного импеданса с компенсацией его начального реактанса
показаны на рис. 2 в виде экспериментальных зависимостей (в логарифмическом
масштабе) входной индуктивности Lвх
(в мГн) как функции компенсирующей индуктивности Lк при различных коэффициентах
умножения m. Видно, что
без компенсации начального
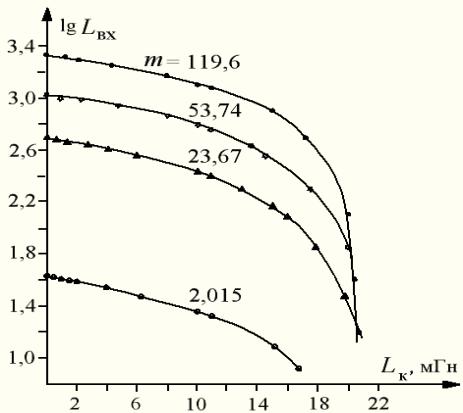
Рис. 2 – Входная индуктивность Lвх как функция компенсирующей Lк
реактанса
индуктивности L1 (при Lк = 0) входная индуктивность Lвх в зависимости от коэффициента
умножения m изменяется на два порядка и
достигает значения 2,12 Гн при m = 119,6. При увеличении
компенсирующей индуктивности Lк входная индуктивность уменьшается
от максимальной величины до значений
меньших начального L1.
Эксперимент подтверждает возможность
управления величиной входной индуктивности в широких пределах с помощью
параметров m и Lк согласно выражению (9).
Увеличение
абсолютного приращения входной индуктивности Lвх от коэффициента умножения m согласно (11) подтверждается
экспериментальными зависимостями на рис. 3. Здесь при изменении индуктивности
датчика L1 на величину
ΔL1 = 0,71 мГн
абсолютное приращение входной индуктивности ΔLвх возрастает на два порядка при m ≥ 100.
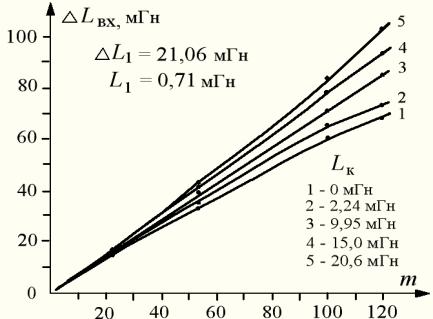
Рис. 3 – Зависимости приращения
входной индуктивности ΔLвх от
коэффициента
умножения m для разных значений Lк
На рис.
4 показаны зависимости относительного приращения (в процен-
тах) ΔLвх/ Lвх входной индуктивности от
компенсирующей Lк для разных значений коэффициента умножения m. Видно, что значение Lк существенно увеличивает относительное приращение, так, при Lк = 0 ΔLвх/ Lвх = 3,37%, а при воз-
растании Lк
до 20,44 мГн ΔLвх/ Lвх
увеличивается до 270%.
На
экспериментальных зависимостях наблюдаются систематические отклонения от
расчетных. Отклонения имеют мультипликативный характер и достигают до 20%. Их
наличие объясняется тем, что исходное выражение (1) справедливо для идеальной
модели операционного усилителя.
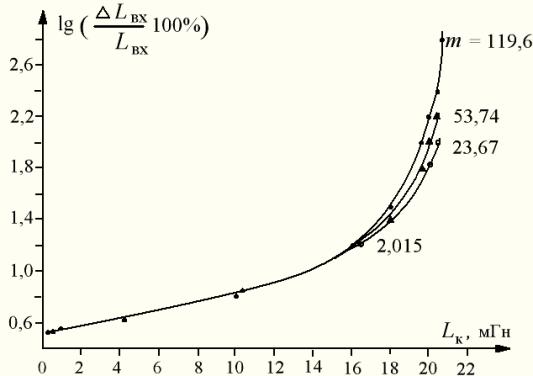
Рис. 4 – Зависимости относительного
приращения ΔLвх/ Lвх
входной
индуктивности от компенсирующей Lк
Вывод. Исследованиями установлено,
что введение в умножитель индуктивности на основе комбинированной операционной
схемы цепи компенсации начального реактанса индуктивного датчика позволяет повысить
его чувствительность к контролируемому параметру.
Литература:
1. Твердоступ Н.И. Обобщенная модель преобразователей импеданса // Вісник
Дніпропетр. ун-ту. Фізика. Радіоелектроніка. – 2010. – Вип. 17, №2. – С. 103 -
108.
2. Твердоступ Н.И.
Высокодобротный умножитель индуктивности // Системні
технології. Регіональний міжвузівський збірник наукових праць. – Випуск 1(72).
– Дніпропетровськ, 2012. - С. 100 – 105.