С. Тилоев, Р.Э. Махмуродов, А.Дж.
Махмадшоев,
Г.С.
Каландарова, М.Ф. Каримова
(Таджикский аграрный
университет имени Ш. Шотемура)
Уравнения движения трехступенчатый
планетарно синусный механизм
Разработка
планетарных синусных механизмов привода опрыскивателей и чеканочных машин
является важной задачей в области теории сельскохозяйственной машиностроении.
Использование планетарных синусных механизмов позволяет увеличить число витков
хлопчатника, тем самым увеличить урожайность с одного гектара за счет
опрыскивания и чеканки а также исследуемое механизм может быт использован для
мойки детали и узлов машин с применением моющихся средств .
Разработки относятся к машиностроению, в
частности к сельскохозяйственному машиностроению и может быть использовано в
качестве привода ножей режущих аппаратов чеканочных машин с одновременным
внесением ядохимикатов для борьбы с сельскохозяйственными вредителями.
Прототипом является синусный механизм,
содержащий кривошип, ползун, кулису со штоком и стойку [1,2,3].
Недостатками являются отсутствие в
механизме направляющей, сателлита и солнечного колеса и насоса, с целью привода
роторных режущих аппаратов и привода насоса со штоком. Для усовершенствования
прототипа и устранения, имеющихся в нем недостатков разработан
планетарно-синусный механизм.
Заявляемое изобретение поясняется
прилагаемой фигурой и изображено в виде кинематической схемы, где, X и Y – оси
координат,
r – радиус сателлита, S1 – ход
ползуна, S2 – ход ползуна с направляющей и φ1 –
угол поворота кривошипа.
Механизм состоит из кривошипа 1, ползуна
2, кулисы 3 со штоком 4 насоса 9, направляющей 5, сателлита 6, солнечного
колеса 7, стойки 8, насоса 9, шарниров А, В и О. Кривошип 1 шарнирно (О и А)
соединен одним концом со стойкой 8 и другим - с ползуном 2, расположенным в
кулисе 3. Ползун 2 посредством направляющей 5 шарнирно соединен с центром В
сателлита 6, который перекатывается по солнечному колесу 7. Кулиса 3 соединена
со штоком 4 насоса 9.
Принцип работы механизма заключается в
следующем: при вращении кривошипа 1, ползун 2 совместно с направляющей 5
совершает возвратно-поступательное движение по вертикали (по оси Y) и сателлит 6 шарнирно соединенный с направляющей 5
перекатывается по солнечному колесу 7, шток 4 насоса 9, соединенный с кулисой
3, совершает поступательное движение по оси X. При этом расстояния S1 и S2 меняются
в зависимости от
Вращения кривошипа, что позволяет
добиваться переменных скоростных характеристик центра сателлитного колеса В. (рис 1).
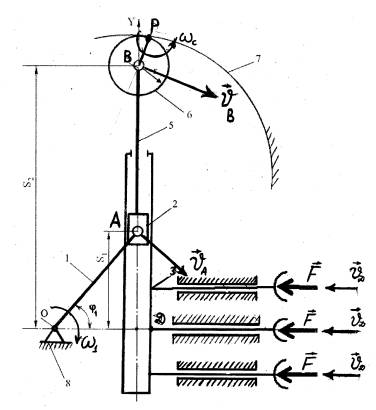
Рис. 1. Кинематическая и
динамическая схема планетарного
синусного механизма
Обозначим
О1А1=R радиус
ведущего звена, АВ=l длина направляющей, АД=l1 длина
ползуна, ВР=r радиус сателлита колеса,
Исследуемый механизм может
использоваться в качестве привода рабочих органов чеканочных машин. Работоспособность
привода ножей чеканочных машин характеризуется в основном активностью их ножей.
Целью конструирования новых приводных механизмов является повышение
эффективности и увеличение производительности чеканочных аппаратов при срезании
верхушек хлопчатника.
Динамическая схема исследуемого класса
приводного механизма при видена на рисунке 4, параметры которого равны: О1А2=R1 – радиус
ведущего звена (кривошипа) 1, В1Р1=В2Р2=r – радиус сателлита5, l1=А1В1–
длина ползунов 7, ![]() – угол поворота
ведущего звена 1 и r=О1Р1–
расстояние линии касания сателлита и солнечного колеса до оси вращения
кривошипа Оr
– угол поворота
ведущего звена 1 и r=О1Р1–
расстояние линии касания сателлита и солнечного колеса до оси вращения
кривошипа Оr
Уравнения Лагранжа II рода для
исследуемого класса механизма определяется выражением:
 (1)
(1)
где ![]() - угловая скорость кривошипа, (р/с);
- угловая скорость кривошипа, (р/с); ![]() - угловая ускорения (р/с2);
- угловая ускорения (р/с2); ![]() - приведенный момент инерции привода (кгм2);
- приведенный момент инерции привода (кгм2); ![]() ,
, ![]() - движущийся момент и момент сопротивления (кгм2).
- движущийся момент и момент сопротивления (кгм2).
Приведенный
момент согласно [1-3] равна
![]()
![]()
После
некоторых преобразований уравнения (1) примет вид:
![]() (2)
(2)
где переменные коэффициенты равны

Уравнения (2) является нелинейным, неоднородным уравнением движения
синусного механизма в форме Лагранжа II рода.
Решение
уравнения движения приводного механизма чеканочных машин позволяет использовать
его при проектировании приводных механизмов ножей этих машин. Исследование
динамических характеристик планетарных синусных механизмов привода опрыскивателей
(борьба сельхозвредителей) и чеканочных машин является одним из основных
проблемой проектирование сельскохозяйственных машиностроение.
На
рис.1. приведена динамическая схема привода трехступенчатого планетарно
синусного механизма чеканочных машин и опрыскивателей, а также привода трех
секционных дождевальных машин для подачи воды.
Решая
нелинейное уравнения (2) движении планетарных синусных механизмов, позволяет
определить параметры агрегатов и проектировать машинный агрегат с одним сателлитом
(ротором) и насосом, с двух сателлитным и двухнасосным механизмов, а также двух
планетарно – синусный механизм с двойным насосом и кулисой, позволяющий
увеличить урожайность технических культур на 5…8 % (хлопчатника), а также
увеличивается производительность процесса подача ядохимикатов в
опрыскивателей за счет изменение
скоростей привода насосов.
ЛИТЕРАТУРА
1.Тилоев
С. и др. Малые патенты РТ Тj 202
Планетарно-синусный
механизм, Тj 227 Двойной
синусный механизм с двойным насосом, Тj 268
Двухкулисный планетарно-синусный механизм.
Душанбе 2008-2009г.
Бюл.53-56.
2.
Тилоев С. и др. Автореферат канд. диссертации. Каунас. 1998г. 18 стр.
3.
Тилоев С. и др. Материалы I, II и III
Международной конференции
«Механика – 94», «Механика – 97»,
«Выбротехника – 98», Вильнюс,
Каунас. 1994, 1997 и 1998 гг.