Васильев
Иван Анатольевич
Санкт-Петербург,
ЦНИИ РТК, нач. лаб., к.т.н
Михаил
Викторович Коваль
Санкт-Петербург,
ЦНИИ РТК, вед. Программист
Владимир
Викторович Горюнов
Санкт-Петербург,
ЦНИИ РТК, вед. Программист
Михаил
Николаевич Плавинский
Санкт-Петербург,
ЦНИИ РТК, нач. лаб.
ОРГАНИЗАЦИЯ
АВТОНОМНОЙ РАБОТЫ МОБИЛЬНОГО РОБОТА В ГРУППЕ
Задача повышения уровня
автономности мобильных роботов специального назначения для обеспечения
безопасности является критически важной по следующим причинам:
-
уменьшается
влияние человеческого фактора (человека-оператора) и повышается надежность
выполнения операций в экстремальных условиях;
-
сокращается
время выполнения операций за счет автоматического выбора оптимальных маршрутов
и режимов работы робота (особенно важно при работе в радиационных полях и
других агрессивных средах);
-
снижается
риск потери дорогостоящего комплекса в условиях неустойчивой связи с роботом.
В ЦНИИ РТК в настоящее
время ведутся проекты, цели которых - развитие технологий и элементов
робототехники, которые могут использоваться:
-
комплексно
в составе многофункциональных робототехнических систем;
-
выборочно
на различных мобильных платформах;
-
в
перспективе, в составе группы мобильных роботов.
Общий перечень задач и
стремление максимально полно использовать возможности робота, определили
перечень базовых сценариев применения мобильного робота:
-
сценарии
наблюдения за зоной/объектом;
-
сценарии
охраны территории/объекта;
-
сценарии
поиска определенных объектов интереса, их идентификации и точной локализации;
-
сценарии
работы с обнаруженными объектами интереса.
Базовый перечень
технологических операций (ТОП) робота определяется вышеперечисленными
сценариями. Технологические операции включают в себя:
-
ТОП
системы обеспечения безопасности робота (предотвращение столкновений с
препятствиями и опрокидывания робота);
-
расчетные
ТОП (построение траекторий, локализация объектов интереса, построение и
коррекция карты);
-
ТОП
отработки команд (обеспечения выполнения заданных режимов функционирования
робота).
Логика функционирования
автономного мобильного робота представлена на рисунке 1.
Рисунок 1
Степень автономности
робота в реальных условиях во многом определяется набором датчиков сенсорной
системы.
Базовый состав сенсоров
робота обеспечивает автономное функционирование (наблюдаемость и управляемость)
по схеме (рисунок 1) при следующих условиях:
-
рабочая
зона робота может быть описана с помощью топологической карты;
-
для
выполнения сценария не требуется измерения специфических параметров окружающей
среды (например, параметров физических полей).
Иными словами, базовый
набор датчиков должен обеспечить безопасное функционирование автономного робота
или его выживание при отказе более сложных систем в следующих условиях:
1) в зоне, размеры
которой обеспечивают её общий обзор и принятие решений об отсутствии
значительных препятствий из одной точки (без специального перемещения робота).
Величина зоны обзора зависит от плотности размещения препятствий, но при любых
условиях не превышает для мини-робота 100х100 метров;
2) на базе минимально
доступного объема данных. По аналогии с сенсорной системой человека,
обеспечивающей его навигацию (чувствительные элементы мышц и суставов,
осязание, зрение в видимом диапазоне, вестибулярный аппарат), такими данными
считаются данные внутренних датчиков состояния робота, видеоинформация, данные
датчиков наклона/ориентации.
Таким образом, к
базовому набору сенсоров мини-робота повышенной автономности относятся:
-
датчики
положения приводов и шарниров;
-
датчики
контроля исправности блоков бортовой аппаратуры;
-
датчики
разряда батарей;
-
бесплатформенная
инерциальная навигационная система (БИНС) или инклинометры;
-
виртуальный
бампер;
-
телевизионная
камера.
Этот набор датчиков
обеспечивает выполнение ТОП отработки команд и является достаточным для
выживания мобильного робота при отказе более сложных систем.
Базовый набор сенсоров
достаточен также для безопасного движения (объезда препятствий и предотвращения
опрокидываний) при управлении с пульта оператора (включая супервизорный режим
управления).
К расширенному составу
сенсоров относятся:
1) дальномеры
(ультразвуковые, лазерные, RGBD камеры) которые позволяют:
-
выполнять
перемещение в зоне, обзор которой из одной точки невозможен (например, по
проложенному среди препятствий протяженному маршруту);
-
избегать
столкновения с динамическими препятствиями;
-
вводить
единую метрику для различных топологических карт и с помощью группы роботов
получать интегрированную карту зоны, превышающей операционные возможности
одного робота;
2) датчики измерения
параметров физических полей (гамма-приборы, тепловизоры), необходимые для
решения задач оценки состояния окружающей среды, поиска опасных объектов и т.п.
Расширение
функциональных возможностей при минимизации весогабаритных характеристик и
энергопотребления автономного мини-робота достигается за счет комплексирования
различных классов сенсоров.
Анализ необходимых
расчетных ТОП, обеспечивающих отработку вышеуказанных сценариев, позволяет
сформулировать следующий перечень алгоритмов верхнего уровня управления
автономным мобильным роботом:
-
алгоритмы
построения и корректировки карт (для мобильных платформ);
-
алгоритмы
оперативной локализации робота в карте (для мобильных платформ);
-
алгоритмы
поиска ориентиров и целеуказания (для мобильных платформ и манипуляторов);
-
алгоритмы
построения маршрутов и траекторий (для мобильных платформ и манипуляторов).
Карта, с которой
работает автономный мобильный робот, не тождественна привычной топографической
карте. В ЦНИИ РТК были разработаны и практически реализованы алгоритмы построения
всех принципиально доступных для мини-робота видов карт, а именно:
-
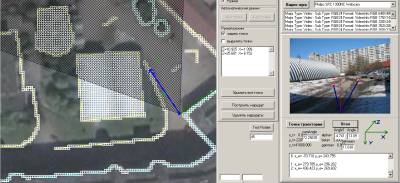
клеточные
карты на базе данных аэрофотосъемки с топографической привязкой по GPS
(рисунок 2);
-
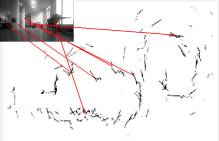
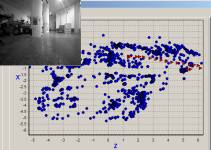
пространственные
2D и 3D карты (рисунки 3-5);
-
карты
физических полей в частности, гамма-поля (рисунок 6).
Оперативная локализация
(определение текущего положения робота) в карте может выполняться одним из
следующих способов:
-
непосредственное
сопоставление сцены, наблюдаемой сенсорами робота с картой, предварительно
полученной с помощью сенсоров той же природы;
-
опосредованная
локализация через независимую систему координат и карту, полученную с помощью
сенсоров другой физической природы.
Первая задача решается
методом вычисления наиболее правдоподобных параметров переноса/поворота и
достаточно хорошо известна. На качество её решения оказывают слишком большое
влияние динамические изменения сцены, неизбежные при реальной работе
автономного робота, особенно на открытой местности.
Более перспективным с
точки зрения повышения автономности является комплексирование нескольких
различных карт, что позволяет использовать наиболее устойчивые элементы каждой
из них. Наиболее распространенным является очевидный способ топографической
привязки объектов всех карт к одной из географических систем координат с помощью
позиционирующих систем ГЛОНАСС/GPS. При всей популярности этого метода, нужно
отметить, что потеря наблюдаемости спутников (довольно частая в реальных
условиях) приводит к фатальным последствиям для автономного робота. Исходя из
этого, для оперативной локализации используется также навигационное счисление,
которое производится на основании данных, получаемых с датчиков БИНС и системы
одометрии. В ЦНИИ РТК проведены исследования по совместному использованию
метрической карты и наблюдаемого телевизионного изображения для локализации
робота в полуавтоматическом режиме (рисунок 7).
Алгоритмы поиска
ориентиров и целеуказания используются в полях гамма-излучения в задачах
поиска, локализации и изъятия источников ионизирующего излучения.
Для обеспечения движения
робота без соударений с окружающими препятствиями разработаны алгоритмы
построения траекторий движения робота из текущего положения в целевое с
объездом препятствий и постоянной перестройки траекторий в зависимости от
окружающей обстановки (рисунок 8).
При отработке автономным
роботом различных задач и сценариев, основные функции управления его
исполнительными элементами выполняет бортовая система управления. Центральным
узлом бортовой системы управления робота является микропроцессор. В
ЦНИИ РТК в разных разработках используются такие вычислительные
архитектуры как x86, ARM, MIPS. При этом каждая из них имеет отличительные
особенности: с точки зрения потребления энергии наибольший интерес представляют
ARM, коммуникационных возможностей – MIPS (Ethernet, Wi-Fi), вычислительной
мощности - x86 (Intel). Так для обеспечения управления приводами, обработки
информации различных датчиков, а также обеспечения радиосвязи на расстоянии до
100 метров открытой местности, используется стандартный роутер DLINK DIR-320,
который программируется с использованием открытого (некоммерческого)
программного обеспечения OpenWRT).
Программная платформа
представляет собой реализацию трех уровней управления (снизу – вверх):
-
контроллер
привода;
-
диспетчер
контроллеров (телеуправление);
-
целевой
функционал управления (траектории, препятствия).
Оба верхних уровня
реализованы на базе операционной системы Linux и независимы от аппаратной
платформы. Эта операционная система предоставляет равные, с точки зрения
выполняемых задач, условия на любых процессорах. Основные преимущества выбора
данной программной платформы:
-
переносимость
между аппаратными платформами;
-
повторная
применяемость программных модулей;
-
структурирование
кода за счет повторного использования;
-
возможность
одновременной разработки составных подпрограмм за счет структурирования;
-
повышение
надежности;
-
простое
взаимодействие роботов имеющих общую платформу;
-
программно
унифицированный пульт управления для всех роботов.
Одной из основных проблем при проектировании системы
управления роботом является реализация связи между отдельными его узлами. Так
как, передача данных должна осуществляться с большой скоростью, по длинным
проводам в условиях повышенных электромагнитных полей, то необходим такой
интерфейс, который бы исключал возникновение ошибок передачи. В ЦНИИ РТК в
качестве такого интерфейса используется CAN интерфейс – последовательный
протокол связи, который эффективно поддерживает распределённое управление в
реальном масштабе времени с высоким уровнем безопасности.
Взаимодействие бортовой системы робота и пульта
оператора осуществляется с применением технологии Ethernet по протоколу TCP/IP.
|
Рисунок
1 |
Рисунок 2 |
Рисунок 3 |
|
Рисунок 4 |
Рисунок
5 |
Рисунок 6 |
|
Рисунок
7 |
Рисунок 8 |
|